Berkeley Lower Extremity Exoskeleton
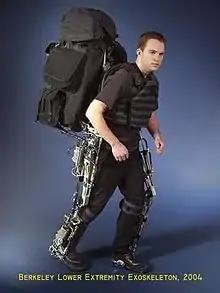
The Berkeley Lower Extremity Exoskeleton (BLEEX) is a robotic device that attaches to the lower body. Its purpose is to complement the user's strength by adding extra force to the user's lower extremity bodily movements. The BLEEX was funded by the Defense Advanced Research Projects Agency (DARPA), and developed by the Berkeley Robotics and Human Engineering Laboratory, a unit within the University of California, Berkeley Department of Mechanical Engineering. DARPA provided the initial $50 million of start-up funds in 2001.[1]
| Berkeley Lower Extremity Exoskeleton (BLEEX) | |
|---|---|
 | |
| Creator | University of California, Berkeley (Berkeley Robotics & Human Engineering Laboratory) Defense Advanced Research Projects Agency |
| Country | |
| Year | 2003 |
Design
The BLEEX has four hydraulically actuated joints: two at the hip, one at the knee, and one at the ankle. The BLEEX is energetically autonomous, meaning it has an on-board power supply.[2]
Performance
The BLEEX consumes 1143 watts of hydraulic power during ground-level walking along with another 200 watts of electrical power for electronics. It can support a load of 75 kilograms (165 lb) while walking at 0.9 metres per second (3.0 ft/s), and can walk at up to 1.3 metres per second (4.3 ft/s) without any load.[2]
References
- Singer, Peter W. "How to Be All That You Can Be: A Look at the Pentagon's Five Step Plan For Making Iron Man Real" Archived 2010-06-08 at the Wayback Machine, The Brookings Institution, 2 May 2008.
- Dollar, Aaron M.; Herr, Hugh (February 2008). "Lower Extremity Exoskeletons and Active Orthoses: Challenges and State-of-the-Art" (PDF). IEEE Transactions on Robotics. 24 (1): 144–158. Archived from the original (PDF) on 8 May 2016. Retrieved 8 August 2016.