Centripetal Catmull–Rom spline
In computer graphics, centripetal Catmull–Rom spline is a variant form of Catmull-Rom spline, originally formulated by Edwin Catmull and Raphael Rom,[1] which can be evaluated using a recursive algorithm proposed by Barry and Goldman.[2] It is a type of interpolating spline (a curve that goes through its control points) defined by four control points , with the curve drawn only from to .




Definition
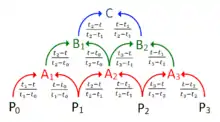

Let denote a point. For a curve segment defined by points and knot sequence , the centripetal Catmull–Rom spline can be produced by:




where





and

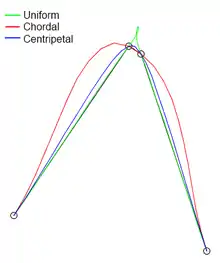
in which ranges from 0 to 1 for knot parameterization, and with . For centripetal Catmull–Rom spline, the value of is . When , the resulting curve is the standard uniform Catmull–Rom spline; when , the product is a chordal Catmull–Rom spline.






Plugging into the spline equations and shows that the value of the spline curve at is . Similarly, substituting into the spline equations shows that at . This is true independent of the value of since the equation for is not needed to calculate the value of at points and .








The extension to 3D points is simply achieved by considering a generic 3D point and



Advantages
Centripetal Catmull–Rom spline has several desirable mathematical properties compared to the original and the other types of Catmull-Rom formulation.[3] First, it will not form loop or self-intersection within a curve segment. Second, cusp will never occur within a curve segment. Third, it follows the control points more tightly.
Other uses
In computer vision, centripetal Catmull-Rom spline has been used to formulate an active model for segmentation. The method is termed active spline model.[4] The model is devised on the basis of active shape model, but uses centripetal Catmull-Rom spline to join two successive points (active shape model uses simple straight line), so that the total number of points necessary to depict a shape is less. The use of centripetal Catmull-Rom spline makes the training of a shape model much simpler, and it enables a better way to edit a contour after segmentation.
Code example in Python
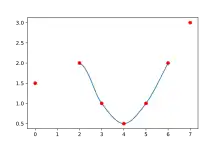
The following is an implementation of the Catmull–Rom spline in Python that produces the plot shown beneath.
import numpy
import matplotlib.pyplot as plt
def CatmullRomSpline(P0, P1, P2, P3, nPoints=100):
"""
P0, P1, P2, and P3 should be (x,y) point pairs that define the Catmull-Rom spline.
nPoints is the number of points to include in this curve segment.
"""
# Convert the points to numpy so that we can do array multiplication
P0, P1, P2, P3 = map(numpy.array, [P0, P1, P2, P3])
# Parametric constant: 0.5 for the centripetal spline, 0.0 for the uniform spline, 1.0 for the chordal spline.
alpha = 0.5
# Premultiplied power constant for the following tj() function.
alpha = alpha/2
def tj(ti, Pi, Pj):
xi, yi = Pi
xj, yj = Pj
return ((xj-xi)**2 + (yj-yi)**2)**alpha + ti
# Calculate t0 to t4
t0 = 0
t1 = tj(t0, P0, P1)
t2 = tj(t1, P1, P2)
t3 = tj(t2, P2, P3)
# Only calculate points between P1 and P2
t = numpy.linspace(t1, t2, nPoints)
# Reshape so that we can multiply by the points P0 to P3
# and get a point for each value of t.
t = t.reshape(len(t), 1)
print(t)
A1 = (t1-t)/(t1-t0)*P0 + (t-t0)/(t1-t0)*P1
A2 = (t2-t)/(t2-t1)*P1 + (t-t1)/(t2-t1)*P2
A3 = (t3-t)/(t3-t2)*P2 + (t-t2)/(t3-t2)*P3
print(A1)
print(A2)
print(A3)
B1 = (t2-t)/(t2-t0)*A1 + (t-t0)/(t2-t0)*A2
B2 = (t3-t)/(t3-t1)*A2 + (t-t1)/(t3-t1)*A3
C = (t2-t)/(t2-t1)*B1 + (t-t1)/(t2-t1)*B2
return C
def CatmullRomChain(P):
"""
Calculate Catmull–Rom for a chain of points and return the combined curve.
"""
sz = len(P)
# The curve C will contain an array of (x, y) points.
C = []
for i in range(sz-3):
c = CatmullRomSpline(P[i], P[i+1], P[i+2], P[i+3])
C.extend(c)
return C
# Define a set of points for curve to go through
Points = [[0, 1.5], [2, 2], [3, 1], [4, 0.5], [5, 1], [6, 2], [7, 3]]
# Calculate the Catmull-Rom splines through the points
c = CatmullRomChain(Points)
# Convert the Catmull-Rom curve points into x and y arrays and plot
x, y = zip(*c)
plt.plot(x, y)
# Plot the control points
px, py = zip(*Points)
plt.plot(px, py, 'or')
plt.show()
Code example in Unity C#
using UnityEngine;
using System.Collections;
using System.Collections.Generic;
public class Catmul : MonoBehaviour {
// Use the transforms of GameObjects in 3d space as your points or define array with desired points
public Transform[] points;
// Store points on the Catmull curve so we can visualize them
List<Vector2> newPoints = new List<Vector2>();
// How many points you want on the curve
uint numberOfPoints = 10;
// Parametric constant: 0.0 for the uniform spline, 0.5 for the centripetal spline, 1.0 for the chordal spline
public float alpha = 0.5f;
/////////////////////////////
void Update()
{
CatmulRom();
}
void CatmulRom()
{
newPoints.Clear();
Vector2 p0 = points[0].position; // Vector3 has an implicit conversion to Vector2
Vector2 p1 = points[1].position;
Vector2 p2 = points[2].position;
Vector2 p3 = points[3].position;
float t0 = 0.0f;
float t1 = GetT(t0, p0, p1);
float t2 = GetT(t1, p1, p2);
float t3 = GetT(t2, p2, p3);
for (float t=t1; t<t2; t+=((t2-t1)/(float)numberOfPoints))
{
Vector2 A1 = (t1-t)/(t1-t0)*p0 + (t-t0)/(t1-t0)*p1;
Vector2 A2 = (t2-t)/(t2-t1)*p1 + (t-t1)/(t2-t1)*p2;
Vector2 A3 = (t3-t)/(t3-t2)*p2 + (t-t2)/(t3-t2)*p3;
Vector2 B1 = (t2-t)/(t2-t0)*A1 + (t-t0)/(t2-t0)*A2;
Vector2 B2 = (t3-t)/(t3-t1)*A2 + (t-t1)/(t3-t1)*A3;
Vector2 C = (t2-t)/(t2-t1)*B1 + (t-t1)/(t2-t1)*B2;
newPoints.Add(C);
}
}
float GetT(float t, Vector2 p0, Vector2 p1)
{
float a = Mathf.Pow((p1.x-p0.x), 2.0f) + Mathf.Pow((p1.y-p0.y), 2.0f);
float b = Mathf.Pow(a, alpha * 0.5f);
return (b + t);
}
// Visualize the points
void OnDrawGizmos()
{
Gizmos.color = Color.red;
foreach (Vector2 temp in newPoints)
{
Vector3 pos = new Vector3(temp.x, temp.y, 0);
Gizmos.DrawSphere(pos, 0.3f);
}
}
}
For an implementation in 3D space, after converting Vector2 to Vector3 points, the first line of function GetT should be changed to this: Mathf.Pow((p1.x-p0.x), 2.0f) + Mathf.Pow((p1.y-p0.y), 2.0f) + Mathf.Pow((p1.z-p0.z), 2.0f);
Code example in Unreal C++
float GetT( float t, float alpha, const FVector& p0, const FVector& p1 )
{
auto d = p1 - p0;
float a = d | d; // Dot product
float b = FMath::Pow( a, alpha*.5f );
return (b + t);
}
FVector CatMullRom( const FVector& p0, const FVector& p1, const FVector& p2, const FVector& p3, float t /* between 0 and 1 */, float alpha=.5f /* between 0 and 1 */ )
{
float t0 = 0.0f;
float t1 = GetT( t0, alpha, p0, p1 );
float t2 = GetT( t1, alpha, p1, p2 );
float t3 = GetT( t2, alpha, p2, p3 );
t = FMath::Lerp( t1, t2, t );
FVector A1 = ( t1-t )/( t1-t0 )*p0 + ( t-t0 )/( t1-t0 )*p1;
FVector A2 = ( t2-t )/( t2-t1 )*p1 + ( t-t1 )/( t2-t1 )*p2;
FVector A3 = ( t3-t )/( t3-t2 )*p2 + ( t-t2 )/( t3-t2 )*p3;
FVector B1 = ( t2-t )/( t2-t0 )*A1 + ( t-t0 )/( t2-t0 )*A2;
FVector B2 = ( t3-t )/( t3-t1 )*A2 + ( t-t1 )/( t3-t1 )*A3;
FVector C = ( t2-t )/( t2-t1 )*B1 + ( t-t1 )/( t2-t1 )*B2;
return C;
}
See also
- Cubic Hermite splines
References
- Catmull, Edwin; Rom, Raphael (1974). "A class of local interpolating splines". In Barnhill, Robert E.; Riesenfeld, Richard F. (eds.). Computer Aided Geometric Design. pp. 317–326. doi:10.1016/B978-0-12-079050-0.50020-5. ISBN 978-0-12-079050-0.
- Barry, Phillip J.; Goldman, Ronald N. (August 1988). A recursive evaluation algorithm for a class of Catmull–Rom splines. Proceedings of the 15st Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH 1988. 22. Association for Computing Machinery. pp. 199–204. doi:10.1145/378456.378511.
- Yuksel, Cem; Schaefer, Scott; Keyser, John (July 2011). "Parameterization and applications of Catmull-Rom curves". Computer-Aided Design. 43 (7): 747–755. CiteSeerX 10.1.1.359.9148. doi:10.1016/j.cad.2010.08.008.
- Jen Hong, Tan; Acharya, U. Rajendra (2014). "Active spline model: A shape based model-interactive segmentation" (PDF). Digital Signal Processing. 35: 64–74. arXiv:1402.6387. doi:10.1016/j.dsp.2014.09.002. S2CID 6953844.
External links
- Catmull-Rom curve with no cusps and no self-intersections – implementation in Java
- Catmull-Rom curve with no cusps and no self-intersections – simplified implementation in C++
- Catmull-Rom splines – interactive generation via Python, in a Jupyter notebook