Poincaré disk model
In geometry, the Poincaré disk model, also called the conformal disk model, is a model of 2-dimensional hyperbolic geometry in which the points of the geometry are inside the unit disk, and the straight lines consist of all circular arcs contained within that disk that are orthogonal to the boundary of the disk, plus all diameters of the disk.
The group of orientation preserving isometries of the disk model is given by the special unitary group SU(1,1).
Along with the Klein model and the Poincaré half-space model, it was proposed by Eugenio Beltrami who used these models to show that hyperbolic geometry was equiconsistent with Euclidean geometry. It is named after Henri Poincaré, because his rediscovery of this representation fourteen years later became better known than the original work of Beltrami.[1]
The Poincaré ball model is the similar model for 3 or n-dimensional hyperbolic geometry in which the points of the geometry are in the n-dimensional unit ball.
Properties
Lines

Hyperbolic straight lines consist of all arcs of Euclidean circles contained within the disk that are orthogonal to the boundary of the disk, plus all diameters of the disk.
Compass and straightedge construction
The unique hyperbolic line through two points P and Q not on a diameter of the boundary circle can be constructed by:
- let P' be the inversion in the boundary circle of point P
- let Q' be the inversion in the boundary circle of point Q
- let M be the midpoint of segment PP'
- let N be the midpoint of segment QQ'
- Draw line m through M perpendicular to segment PP'
- Draw line n through N perpendicular to segment QQ'
- let C be where line m and line n intersect.
- Draw circle c with center C and going through P (and Q).
- The part of circle c that is inside the disk is the hyperbolic line.
If P and Q are on a diameter of the boundary circle that diameter is the hyperbolic line.
Another way is:
- let M be the midpoint of segment PQ
- Draw line m through M perpendicular to segment PQ
- let P' be the inversion in the boundary circle of point P
- let N be the midpoint of segment PP'
- Draw line n through N perpendicular to segment PP'
- let C be where line m and line n intersect.
- Draw circle c with center C and going through P (and Q).
- The part of circle c that is inside the disk is the hyperbolic line.
Distance
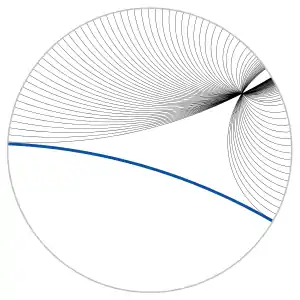
Distances in this model are Cayley–Klein metrics. Given two distinct points p and q inside the disk, the unique hyperbolic line connecting them intersects the boundary at two ideal points, a and b, label them so that the points are, in order, a, p, q, b and |aq| > |ap| and |pb| > |qb|.
The hyperbolic distance between p and q is then .

The vertical bars indicate Euclidean length of the line segment connecting the points between them in the model (not along the circle arc), ln is the natural logarithm.
Another way to calculate the hyperbolic distance between two points is

where and are the distances of p respective q to the centre of the disk, the distance between p and q, the radius of the boundary circle of the disk and is the inverse hyperbolic function of hyperbolic cosine.





When the disk used is the open unit disk and one of the points is the origin and the Euclidean distance between the points is r then the hyperbolic distance is: where is the inverse hyperbolic function of the hyperbolic tangent.


When the disk used is the open unit disk and point lies between the origin and point (i.e. the two points are on the same radius, have the same polar angle and ), their hyperbolic distance is . This reduces to the previous formula if .





Circles
A circle (the set of all points in a plane that are at a given distance from a given point, its center) is a circle completely inside the disk not touching or intersecting its boundary. The hyperbolic center of the circle in the model does in general not correspond to the Euclidean center of the circle, but they are on the same radius of the boundary circle.
Hypercycles
A hypercycle (the set of all points in a plane that are on one side and at a given distance from a given line, its axis) is a Euclidean circle arc or chord of the boundary circle that intersects the boundary circle at a non-right angle. Its axis is the hyperbolic line that shares the same two ideal points. This is also known as an equidistant curve.
Horocycles
A horocycle (a curve whose normal or perpendicular geodesics all converge asymptotically in the same direction), is a circle inside the disk that touches the boundary circle of the disk. The point where it touches the boundary circle is not part of the horocycle. It is an ideal point and is the hyperbolic center of the horocycle.
Euclidean synopsis
A Euclidean circle:
- that is completely inside the disk is a hyperbolic circle.
- (When the center of the disk is not inside the circle, the Euclidean center is always closer to the center of the disk than the hyperbolic center, i.e. holds.)

- that is inside the disk and touches the boundary is a horocycle;
- that intersects the boundary orthogonally is a hyperbolic line; and
- that intersects the boundary non-orthogonally is a hypercycle.
A Euclidean chord of the boundary circle:
- that goes through the center is a hyperbolic line; and
- that does not go through the center is a hypercycle.
Metric and curvature
If u and v are two vectors in real n-dimensional vector space Rn with the usual Euclidean norm, both of which have norm less than 1, then we may define an isometric invariant by

where denotes the usual Euclidean norm. Then the distance function is


Such a distance function is defined for any two vectors of norm less than one, and makes the set of such vectors into a metric space which is a model of hyperbolic space of constant curvature −1. The model has the conformal property that the angle between two intersecting curves in hyperbolic space is the same as the angle in the model.
The associated metric tensor of the Poincaré disk model is given by[2]

where the xi are the Cartesian coordinates of the ambient Euclidean space. The geodesics of the disk model are circles perpendicular to the boundary sphere Sn−1.
An orthonormal frame with respect to this Riemannian metric is given by

with dual coframe of 1-forms

In two dimensions
In two dimensions, with respect to these frames and the Levi-Civita connection, the connection forms are given by the unique skew-symmetric matrix of 1-forms that is torsion-free, i.e., that satisfies the matrix equation . Solving this equation for yields



whence the curvature matrix is

Therefore, the curvature of the hyperbolic disk is

Relation to other models of hyperbolic geometry

Relation to the Klein disk model
The Klein disk model (also known as the Beltrami–Klein model) and the Poincaré disk model are both models that project the whole hyperbolic plane in a disk. The two models are related through a projection on or from the hemisphere model. The Klein disk model is an orthographic projection to the hemisphere model while the Poincaré disk model is a stereographic projection.
An advantage of the Klein disk model is that lines in this model are Euclidean straight chords. A disadvantage is that the Klein disk model is not conformal (circles and angles are distorted).
When projecting the same lines in both models on one disk both lines go through the same two ideal points. (the ideal points remain on the same spot) also the pole of the chord in the Klein disk model is the center of the circle that contains the arc in the Poincaré disk model.
A point (x,y) in the Poincaré disk model maps to in the Klein model.

A point (x,y) in the Klein model maps to in the Poincaré disk model.

For ideal points and the formulas become so the points are fixed.


If is a vector of norm less than one representing a point of the Poincaré disk model, then the corresponding point of the Klein disk model is given by:


Conversely, from a vector of norm less than one representing a point of the Beltrami–Klein model, the corresponding point of the Poincaré disk model is given by:


Relation to the Poincaré half-plane model
The Poincaré disk model and the Poincaré half-plane model are both named after Henri Poincaré.
If is a vector of norm less than one representing a point of the Poincaré disk model, then the corresponding point of the half-plane model is given by:

A point (x,y) in the disk model maps to in the halfplane model.[3]

A point (x,y) in the halfplane model maps to in the disk model.

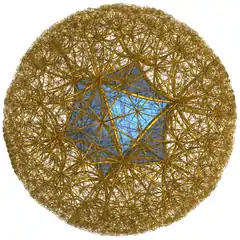
Relation to the hyperboloid model

The Poincaré disk model, as well as the Klein model, are related to the hyperboloid model projectively. If we have a point [t, x1, ..., xn] on the upper sheet of the hyperboloid of the hyperboloid model, thereby defining a point in the hyperboloid model, we may project it onto the hyperplane t = 0 by intersecting it with a line drawn through [−1, 0, ..., 0]. The result is the corresponding point of the Poincaré disk model.
For Cartesian coordinates (t, xi) on the hyperboloid and (yi) on the plane, the conversion formulas are:


Compare the formulas for stereographic projection between a sphere and a plane.
Analytic geometry constructions in the hyperbolic plane
A basic construction of analytic geometry is to find a line through two given points. In the Poincaré disk model, lines in the plane are defined by portions of circles having equations of the form

which is the general form of a circle orthogonal to the unit circle, or else by diameters. Given two points u and v in the disk which do not lie on a diameter, we can solve for the circle of this form passing through both points, and obtain

If the points u and v are points on the boundary of the disk not lying at the endpoints of a diameter, the above simplifies to

Angles
We may compute the angle between the circular arc whose endpoints (ideal points) are given by unit vectors u and v, and the arc whose endpoints are s and t, by means of a formula. Since the ideal points are the same in the Klein model and the Poincaré disk model, the formulas are identical for each model.
If both models' lines are diameters, so that v = −u and t = −s, then we are merely finding the angle between two unit vectors, and the formula for the angle θ is

If v = −u but not t = −s, the formula becomes, in terms of the wedge product (),


where



If both chords are not diameters, the general formula obtains

where


Using the Binet–Cauchy identity and the fact that these are unit vectors we may rewrite the above expressions purely in terms of the dot product, as



Artistic realizations
M. C. Escher explored the concept of representing infinity on a two-dimensional plane. Discussions with Canadian mathematician H.S.M. Coxeter around 1956 inspired Escher's interest in hyperbolic tessellations, which are regular tilings of the hyperbolic plane. Escher's wood engravings Circle Limit I–IV demonstrate this concept between 1958 and 1960, the final one being Circle Limit IV: Heaven and Hell in 1960.[4] According to Bruno Ernst, the best of them is Circle Limit III.
{kind=link}
See also
References
- Penrose, Roger (2004). The Road To Reality: A Complete Guide to the Laws of the Universe. Great Britain: Jonathan Cape. p. 45. ISBN 0-224-04447-8.
- "Comparing metric tensors of the Poincare and the Klein disk models of hyperbolic geometry". Stack Exchange. May 23, 2015.
- "Mapping the Poincare disk model to the Poincare half plane model". Retrieved 13 December 2015.
- Escher's Circle Limit Exploration
Further reading
- James W. Anderson, Hyperbolic Geometry, second edition, Springer, 2005.
- Eugenio Beltrami, Teoria fondamentale degli spazii di curvatura costante, Annali. di Mat., ser II 2 (1868), 232–255.
- Saul Stahl, The Poincaré Half-Plane, Jones and Bartlett, 1993.
External links
 Media related to Poincaré disk models at Wikimedia Commons
Media related to Poincaré disk models at Wikimedia Commons