Pushforward (differential)
In differential geometry, pushforward is a linear approximation of smooth maps on tangent spaces. Suppose that φ : M → N is a smooth map between smooth manifolds; then the differential of φ, , at a point x is, in some sense, the best linear approximation of φ near x. It can be viewed as a generalization of the total derivative of ordinary calculus. Explicitly, the differential is a linear map from the tangent space of M at x to the tangent space of N at φ(x), . Hence it can be used to push tangent vectors on M forward to tangent vectors on N. The differential of a map φ is also called, by various authors, the derivative or total derivative of φ.



Motivation
Let φ : U → V be a smooth map from an open subset U of Rm to an open subset V of Rn. For any point x in U, the Jacobian of φ at x (with respect to the standard coordinates) is the matrix representation of the total derivative of φ at x, which is a linear map

We wish to generalize this to the case that φ is a smooth function between any smooth manifolds M and N.
The differential of a smooth map
Let φ : M → N be a smooth map of smooth manifolds. Given some x ∈ M, the differential of φ at x is a linear map

from the tangent space of M at x to the tangent space of N at φ(x). The application of dφx to a tangent vector X is sometimes called the pushforward of X by φ. The exact definition of this pushforward depends on the definition one uses for tangent vectors (for the various definitions see tangent space).
If tangent vectors are defined as equivalence classes of curves through x then the differential is given by


Here γ is a curve in M with γ(0) = x and is tangent vector to the curve γ at 0. In other words, the pushforward of the tangent vector to the curve γ at 0 is the tangent vector to the curve φ ∘ γ at 0.

Alternatively, if tangent vectors are defined as derivations acting on smooth real-valued functions, then the differential is given by

for an arbitrary function and an arbitrary derivation at point (a derivation is defined as a linear map that satisfies the Leibniz rule, see: definition of tangent space via derivations). By definition, the pushforward of is in and therefore itself is a derivation, .







After choosing two charts around x and around φ(x), φ is locally determined by a smooth map

between open sets of Rm and Rn, and dφx has representation (at x)

in the Einstein summation notation, where the partial derivatives are evaluated at the point in U corresponding to x in the given chart.
Extending by linearity gives the following matrix

Thus the differential is a linear transformation, between tangent spaces, associated to the smooth map φ at each point. Therefore, in some chosen local coordinates, it is represented by the Jacobian matrix of the corresponding smooth map from Rm to Rn. In general the differential need not be invertible. If φ is a local diffeomorphism, then the pushforward at x is invertible and its inverse gives the pullback of Tφ(x)N.
The differential is frequently expressed using a variety of other notations such as

It follows from the definition that the differential of a composite is the composite of the differentials (i.e., functorial behaviour). This is the chain rule for smooth maps.
Also, the differential of a local diffeomorphism is a linear isomorphism of tangent spaces.
The differential on the tangent bundle
The differential of a smooth map φ induces, in an obvious manner, a bundle map (in fact a vector bundle homomorphism) from the tangent bundle of M to the tangent bundle of N, denoted by dφ or φ∗, which fits into the following commutative diagram:
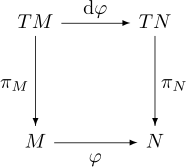
where πM and πN denote the bundle projections of the tangent bundles of M and N respectively.
induces a bundle map from TM to the pullback bundle φ∗TN over M via


where and The latter map may in turn be viewed as a section of the vector bundle Hom(TM, φ∗TN) over M. The bundle map dφ is also denoted by Tφ and called the tangent map. In this way, T is a functor.


Pushforward of vector fields
Given a smooth map φ : M → N and a vector field X on M, it is not usually possible to identify a pushforward of X by φ with some vector field Y on N. For example, if the map φ is not surjective, there is no natural way to define such a pushforward outside of the image of φ. Also, if φ is not injective there may be more than one choice of pushforward at a given point. Nevertheless, one can make this difficulty precise, using the notion of a vector field along a map.
A section of φ∗TN over M is called a vector field along φ. For example, if M is a submanifold of N and φ is the inclusion, then a vector field along φ is just a section of the tangent bundle of N along M; in particular, a vector field on M defines such a section via the inclusion of TM inside TN. This idea generalizes to arbitrary smooth maps.
Suppose that X is a vector field on M, i.e., a section of TM. Then, yields, in the above sense, the pushforward φ∗X, which is a vector field along φ, i.e., a section of φ∗TN over M.

Any vector field Y on N defines a pullback section φ∗Y of φ∗TN with (φ∗Y)x = Yφ(x). A vector field X on M and a vector field Y on N are said to be φ-related if φ∗X = φ∗Y as vector fields along φ. In other words, for all x in M, dφx(X) = Yφ(x).
In some situations, given a X vector field on M, there is a unique vector field Y on N which is φ-related to X. This is true in particular when φ is a diffeomorphism. In this case, the pushforward defines a vector field Y on N, given by

A more general situation arises when φ is surjective (for example the bundle projection of a fiber bundle). Then a vector field X on M is said to be projectable if for all y in N, dφx(Xx) is independent of the choice of x in φ−1({y}). This is precisely the condition that guarantees that a pushforward of X, as a vector field on N, is well defined.
See also
References
- Lee, John M. (2003). Introduction to Smooth Manifolds. Springer Graduate Texts in Mathematics. 218.
- Jost, Jürgen (2002). Riemannian Geometry and Geometric Analysis. Berlin: Springer-Verlag. ISBN 3-540-42627-2. See section 1.6.
- Abraham, Ralph; Marsden, Jerrold E. (1978). Foundations of Mechanics. London: Benjamin-Cummings. ISBN 0-8053-0102-X. See section 1.7 and 2.3.