List of equations in classical mechanics
Classical mechanics is the branch of physics used to describe the motion of macroscopic objects.[1] It is the most familiar of the theories of physics. The concepts it covers, such as mass, acceleration, and force, are commonly used and known.[2] The subject is based upon a three-dimensional Euclidean space with fixed axes, called a frame of reference. The point of concurrency of the three axes is known as the origin of the particular space.[3]
Classical mechanics utilises many equations—as well as other mathematical concepts—which relate various physical quantities to one another. These include differential equations, manifolds, Lie groups, and ergodic theory.[4] This page gives a summary of the most important of these.
This article lists equations from Newtonian mechanics, see analytical mechanics for the more general formulation of classical mechanics (which includes Lagrangian and Hamiltonian mechanics).
Classical mechanics
Mass and inertia
| Quantity (common name/s) | (Common) symbol/s | Defining equation | SI units | |
|---|---|---|---|---|
| Linear, surface, volumetric mass density | λ or μ (especially in acoustics, see below) for Linear, σ for surface, ρ for volume. |
|
kg m−n, n = 1, 2, 3 | [M][L]−n |
| Moment of mass[5] | m (No common symbol) | Point mass:
Discrete masses about an axis : Continuum of mass about an axis : |
kg m | [M][L] |
| Center of mass | rcom
(Symbols vary) |
ith moment of mass
Discrete masses: Mass continuum: |
m | [L] |
| 2-Body reduced mass | m12, μ Pair of masses = m1 and m2 | kg | [M] | |
| Moment of inertia (MOI) | I | Discrete Masses:
Mass continuum: |
kg m2 | [M][L]2 |













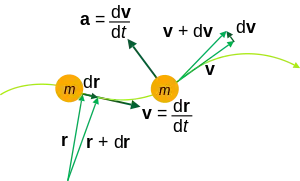
Derived kinematic quantities
| Quantity (common name/s) | (Common) symbol/s | Defining equation | SI units | Dimension |
|---|---|---|---|---|
| Velocity | v | m s−1 | [L][T]−1 | |
| Acceleration | a | m s−2 | [L][T]−2 | |
| Jerk | j | m s−3 | [L][T]−3 | |
| Jounce | s | m s−4 | [L][T]−4 | |
| Angular velocity | ω | rad s−1 | [T]−1 | |
| Angular Acceleration | α | rad s−2 | [T]−2 | |
| Angular jerk | ζ | rad s−3 | [T]−3 |







Derived dynamic quantities
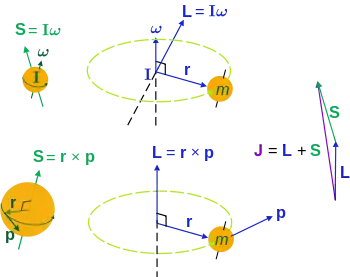
Left: intrinsic "spin" angular momentum S is really orbital angular momentum of the object at every point,
right: extrinsic orbital angular momentum L about an axis,
top: the moment of inertia tensor I and angular velocity ω (L is not always parallel to ω)[6]
bottom: momentum p and its radial position r from the axis.
The total angular momentum (spin + orbital) is J.
| Quantity (common name/s) | (Common) symbol/s | Defining equation | SI units | Dimension |
|---|---|---|---|---|
| Momentum | p | kg m s−1 | [M][L][T]−1 | |
| Force | F | N = kg m s−2 | [M][L][T]−2 | |
| Impulse | J, Δp, I | kg m s−1 | [M][L][T]−1 | |
| Angular momentum about a position point r0, | L, J, S |
Most of the time we can set r0 = 0 if particles are orbiting about axes intersecting at a common point. |
kg m2 s−1 | [M][L]2[T]−1 |
| Moment of a force about a position point r0, | τ, M | N m = kg m2 s−2 | [M][L]2[T]−2 | |
| Angular impulse | ΔL (no common symbol) | kg m2 s−1 | [M][L]2[T]−1 |






General energy definitions
| Quantity (common name/s) | (Common) symbol/s | Defining equation | SI units | Dimension |
|---|---|---|---|---|
| Mechanical work due to a Resultant Force | W | J = N m = kg m2 s−2 | [M][L]2[T]−2 | |
| Work done ON mechanical system, Work done BY | WON, WBY | J = N m = kg m2 s−2 | [M][L]2[T]−2 | |
| Potential energy | φ, Φ, U, V, Ep | J = N m = kg m2 s−2 | [M][L]2[T]−2 | |
| Mechanical power | P | W = J s−1 | [M][L]2[T]−3 |




Every conservative force has a potential energy. By following two principles one can consistently assign a non-relative value to U:
- Wherever the force is zero, its potential energy is defined to be zero as well.
- Whenever the force does work, potential energy is lost.
Generalized mechanics
| Quantity (common name/s) | (Common) symbol/s | Defining equation | SI units | Dimension |
|---|---|---|---|---|
| Generalized coordinates | q, Q | varies with choice | varies with choice | |
| Generalized velocities | varies with choice | varies with choice | ||
| Generalized momenta | p, P | varies with choice | varies with choice | |
| Lagrangian | L |
where and p = p(t) are vectors of the generalized coords and momenta, as functions of time |
J | [M][L]2[T]−2 |
| Hamiltonian | H | J | [M][L]2[T]−2 | |
| Action, Hamilton's principal function | S, | J s | [M][L]2[T]−1 |








Kinematics
In the following rotational definitions, the angle can be any angle about the specified axis of rotation. It is customary to use θ, but this does not have to be the polar angle used in polar coordinate systems. The unit axial vector

defines the axis of rotation, = unit vector in direction of r, = unit vector tangential to the angle.


| Translation | Rotation | |
|---|---|---|
| Velocity | Average:
Instantaneous: |
Angular velocity
Rotating rigid body: |
| Acceleration | Average:
Instantaneous: |
Angular acceleration
Rotating rigid body: |
| Jerk | Average:
Instantaneous: |
Angular jerk
Rotating rigid body: |












Dynamics
| Translation | Rotation | |
|---|---|---|
| Momentum | Momentum is the "amount of translation"
For a rotating rigid body: |
Angular momentum
Angular momentum is the "amount of rotation": and the cross-product is a pseudovector i.e. if r and p are reversed in direction (negative), L is not. In general I is an order-2 tensor, see above for its components. The dot · indicates tensor contraction. |
| Force and Newton's 2nd law | Resultant force acts on a system at the center of mass, equal to the rate of change of momentum:
For a number of particles, the equation of motion for one particle i is:[7] where pi = momentum of particle i, Fij = force on particle i by particle j, and FE = resultant external force (due to any agent not part of system). Particle i does not exert a force on itself. |
Torque
Torque τ is also called moment of a force, because it is the rotational analogue to force:[8] For rigid bodies, Newton's 2nd law for rotation takes the same form as for translation: Likewise, for a number of particles, the equation of motion for one particle i is:[9] |
| Yank | Yank is rate of change of force:
For constant mass, it becomes; |
Rotatum
Rotatum Ρ is also called moment of a Yank, because it is the rotational analogue to yank: |
| Impulse | Impulse is the change in momentum:
For constant force F: |
Angular impulse is the change in angular momentum:
For constant torque τ: |














Precession
The precession angular speed of a spinning top is given by:

where w is the weight of the spinning flywheel.
Energy
The mechanical work done by an external agent on a system is equal to the change in kinetic energy of the system:
- General work-energy theorem (translation and rotation)
The work done W by an external agent which exerts a force F (at r) and torque τ on an object along a curved path C is:

where θ is the angle of rotation about an axis defined by a unit vector n.

For a stretched spring fixed at one end obeying Hooke's law:

where r2 and r1 are collinear coordinates of the free end of the spring, in the direction of the extension/compression, and k is the spring constant.
Euler's equations for rigid body dynamics
Euler also worked out analogous laws of motion to those of Newton, see Euler's laws of motion. These extend the scope of Newton's laws to rigid bodies, but are essentially the same as above. A new equation Euler formulated is:[10]

where I is the moment of inertia tensor.
General planar motion
The previous equations for planar motion can be used here: corollaries of momentum, angular momentum etc. can immediately follow by applying the above definitions. For any object moving in any path in a plane,

the following general results apply to the particle.
| Kinematics | Dynamics |
|---|---|
| Position
|
|
| Velocity
|
Momentum
Angular momenta |
| Acceleration
|
The centripetal force is
where again m is the mass moment, and the coriolis force is The Coriolis acceleration and force can also be written: |








Central force motion
For a massive body moving in a central potential due to another object, which depends only on the radial separation between the centers of masses of the two objects, the equation of motion is:

Equations of motion (constant acceleration)
These equations can be used only when acceleration is constant. If acceleration is not constant then the general calculus equations above must be used, found by integrating the definitions of position, velocity and acceleration (see above).
| Linear motion | Angular motion |
|---|---|










Galilean frame transforms
For classical (Galileo-Newtonian) mechanics, the transformation law from one inertial or accelerating (including rotation) frame (reference frame traveling at constant velocity - including zero) to another is the Galilean transform.
Unprimed quantities refer to position, velocity and acceleration in one frame F; primed quantities refer to position, velocity and acceleration in another frame F' moving at translational velocity V or angular velocity Ω relative to F. Conversely F moves at velocity (—V or —Ω) relative to F'. The situation is similar for relative accelerations.
| Motion of entities | Inertial frames | Accelerating frames |
|---|---|---|
| Translation
V = Constant relative velocity between two inertial frames F and F'. |
Relative position Relative velocity |
Relative accelerations Apparent/fictitious forces |
| Rotation
Ω = Constant relative angular velocity between two frames F and F'. |
Relative angular position Relative velocity |
Relative accelerations Apparent/fictitious torques |
| Transformation of any vector T to a rotating frame | ||











Mechanical oscillators
SHM, DHM, SHO, and DHO refer to simple harmonic motion, damped harmonic motion, simple harmonic oscillator and damped harmonic oscillator respectively.
| Physical situation | Nomenclature | Translational equations | Angular equations |
|---|---|---|---|
| SHM |
|
Solution: |
Solution: |
| Unforced DHM |
|
Solution (see below for ω'): Resonant frequency: Damping rate: Expected lifetime of excitation: |
Solution: Resonant frequency: Damping rate: Expected lifetime of excitation: |













| Physical situation | Nomenclature | Equations |
|---|---|---|
| Linear undamped unforced SHO |
|
|
| Linear unforced DHO |
|
|
| Low amplitude angular SHO |
|
|
| Low amplitude simple pendulum |
|
Approximate value
Exact value can be shown to be: |





| Physical situation | Nomenclature | Equations |
|---|---|---|
| SHM energy |
|
Potential energy
Maximum value at x = A: Kinetic energy Total energy |
| DHM energy |





See also
- List of physics formulae
- Defining equation (physics)
- Defining equation (physical chemistry)
- Constitutive equation
- Mechanics
- Optics
- Electromagnetism
- Thermodynamics
- Acoustics
- Isaac Newton
- List of equations in wave theory
- List of relativistic equations
- List of equations in fluid mechanics
- List of equations in gravitation
- List of electromagnetism equations
- List of photonics equations
- List of equations in quantum mechanics
- List of equations in nuclear and particle physics
Notes
- Mayer, Sussman & Wisdom 2001, p. xiii
- Berkshire & Kibble 2004, p. 1
- Berkshire & Kibble 2004, p. 2
- Arnold 1989, p. v
- Section: Moments and center of mass
- R.P. Feynman; R.B. Leighton; M. Sands (1964). Feynman's Lectures on Physics (volume 2). Addison-Wesley. pp. 31–7. ISBN 978-0-201-02117-2.
- "Relativity, J.R. Forshaw 2009"
- "Mechanics, D. Kleppner 2010"
- "Relativity, J.R. Forshaw 2009"
- "Relativity, J.R. Forshaw 2009"
References
- Arnold, Vladimir I. (1989), Mathematical Methods of Classical Mechanics (2nd ed.), Springer, ISBN 978-0-387-96890-2
- Berkshire, Frank H.; Kibble, T. W. B. (2004), Classical Mechanics (5th ed.), Imperial College Press, ISBN 978-1-86094-435-2
- Mayer, Meinhard E.; Sussman, Gerard J.; Wisdom, Jack (2001), Structure and Interpretation of Classical Mechanics, MIT Press, ISBN 978-0-262-19455-6