Hamiltonian mechanics
Hamiltonian mechanics is a mathematically sophisticated formulation of classical mechanics. Historically, it contributed to the formulation of statistical mechanics and quantum mechanics. Hamiltonian mechanics was first formulated by William Rowan Hamilton in 1833, starting from Lagrangian mechanics, a previous reformulation of classical mechanics introduced by Joseph Louis Lagrange in 1788. Like Lagrangian mechanics, Hamiltonian mechanics is equivalent to Newton's laws of motion in the framework of classical mechanics.

| Part of a series on |
| Classical mechanics |
|---|

Overview
In Hamiltonian mechanics, a classical physical system is described by a set of canonical coordinates r = (q, p), where each component of the coordinate qi, pi is indexed to the frame of reference of the system. The qi are called generalized coordinates, and are chosen so as to eliminate the constraints or to take advantage of the symmetries of the problem, and pi are their conjugate momenta.
The time evolution of the system is uniquely defined by Hamilton's equations:[1]

where is the Hamiltonian, which often corresponds to the total energy of the system.[2] For a closed system, it is the sum of the kinetic and potential energy in the system.

In Newtonian mechanics, the time evolution is obtained by computing the total force being exerted on each particle of the system, and from Newton's second law, the time evolutions of both position and velocity are computed. In contrast, in Hamiltonian mechanics, the time evolution is obtained by computing the Hamiltonian of the system in the generalized coordinates and inserting it into Hamilton's equations. This approach is equivalent to the one used in Lagrangian mechanics. The Hamiltonian is the Legendre transform of the Lagrangian when holding q and t fixed and defining p as the dual variable, and thus both approaches give the same equations for the same generalized momentum. The main motivation to use Hamiltonian mechanics instead of Lagrangian mechanics comes from the symplectic structure of Hamiltonian systems.
While Hamiltonian mechanics can be used to describe simple systems such as a bouncing ball, a pendulum or an oscillating spring in which energy changes from kinetic to potential and back again over time, its strength is shown in more complex dynamic systems, such as planetary orbits in celestial mechanics.[3] The more degrees of freedom the system has, the more complicated its time evolution is and, in most cases, it becomes chaotic.
Basic physical interpretation
A simple interpretation of Hamiltonian mechanics comes from its application on a one-dimensional system consisting of one particle of mass m. The Hamiltonian can represent the total energy of the system, which is the sum of kinetic and potential energy, traditionally denoted T and V, respectively. Here q is the space coordinate and p is the momentum mv. Then

T is a function of p alone, while V is a function of q alone (i.e., T and V are scleronomic).
In this example, the time derivative of the momentum p equals the Newtonian force, and so the first Hamilton equation means that the force equals the negative gradient of potential energy. The time derivative of q is the velocity, and so the second Hamilton equation means that the particle's velocity equals the derivative of its kinetic energy with respect to its momentum.
Calculating a Hamiltonian from a Lagrangian
Given a Lagrangian in terms of the generalized coordinates qi and generalized velocities and time,

- The momenta are calculated by differentiating the Lagrangian with respect to the (generalized) velocities:
- The velocities are expressed in terms of the momenta pi by inverting the expressions in the previous step.
- The Hamiltonian is calculated using the usual definition of H as the Legendre transformation of L:


Example
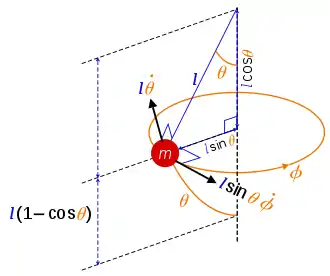
Spherical pendulum consists of a mass m moving without friction on the surface of a sphere. The only forces acting on the mass are the reaction from the sphere and gravity. Spherical coordinates are used to describe the position of the mass in terms of (r, θ, φ), where r is fixed, r=l.
The Lagrangian for this system is[4]

Thus the Hamiltonian is

where

and

In terms of coordinates and momenta, the Hamiltonian reads

Hamilton's equations give the time evolution of coordinates and conjugate momenta in four first-order differential equations,
- .




Momentum , which corresponds to the vertical component of angular momentum , is a constant of motion. That is a consequence of the rotational symmetry of the system around the vertical axis. Being absent from the Hamiltonian, azimuth is a cyclic coordinate, which implies conservation of its conjugate momentum.



Deriving Hamilton's equations
Hamilton's equations can be derived by looking at how the total differential of the Lagrangian depends on time, generalized positions qi, and generalized velocities q̇i:[5]

The generalized momenta were defined as

If this is substituted into the total differential of the Lagrangian, one gets

This can be rewritten as

which after rearranging leads to

The term on the left-hand side is just the Hamiltonian that was defined before, therefore

It is also possible to calculate the total differential of the Hamiltonian H with respect to time directly, similar to what was carried on with the Lagrangian L above, yielding:

It follows from the previous two independent equations that their right-hand sides are equal with each other. The result is

Since this calculation was done off-shell , one can associate corresponding terms from both sides of this equation to yield:

On-shell, Lagrange's equations indicate that

A rearrangement of this yields

Thus Hamilton's equations are

Hamilton's equations consist of 2n first-order differential equations, while Lagrange's equations consist of n second-order equations. Hamilton's equations usually do not reduce the difficulty of finding explicit solutions, but they still offer some advantages: Important theoretical results can be derived, because coordinates and momenta are independent variables with nearly symmetric roles.
Hamilton's equations have another advantage over Lagrange's equations: if a system has a symmetry, such that a coordinate does not occur in the Hamiltonian, the corresponding momentum is conserved, and that coordinate can be ignored in the other equations of the set. This effectively reduces the problem from n coordinates to (n − 1) coordinates. In the Lagrangian framework, the result that the corresponding momentum is conserved still follows immediately, but all the generalized velocities still occur in the Lagrangian. A system of equations in n coordinates still has to be solved.[2] The Lagrangian and Hamiltonian approaches provide the groundwork for deeper results in the theory of classical mechanics, and for formulations of quantum mechanics.
Hamiltonian of a charged particle in an electromagnetic field
A sufficient illustration of Hamiltonian mechanics is given by the Hamiltonian of a charged particle in an electromagnetic field. In Cartesian coordinates the Lagrangian of a non-relativistic classical particle in an electromagnetic field is (in SI Units):

where q is the electric charge of the particle, φ is the electric scalar potential, and the Ai are the components of the magnetic vector potential that may all explicitly depend on and .


This Lagrangian, combined with Euler–Lagrange equation, produces the Lorentz force law

and is called minimal coupling.
Note that the values of scalar potential and vector potential would change during a gauge transformation,[6] and the Lagrangian itself will pick up extra terms as well; But the extra terms in Lagrangian add up to a total time derivative of a scalar function, and therefore won't change the Euler–Lagrange equation.
The canonical momenta are given by:

Note that canonical momenta are not gauge invariant, and are not physically measurable. However, the kinetic momentum:

is gauge invariant and physically measurable.
The Hamiltonian, as the Legendre transformation of the Lagrangian, is therefore:

This equation is used frequently in quantum mechanics.
Under Gauge Transformation:

where f(r,t) is any scalar function of space and time, the aforementioned Lagrangian, canonical momenta, and Hamiltonian transform like:

which still produces the same Hamilton's equation:

In quantum mechanics, the wave function will also undergo a local U(1) group transformation[7] during the Gauge Transformation, which implies that all physical results must be invariant under local U(1) transformations.
Relativistic charged particle in an electromagnetic field
The relativistic Lagrangian for a particle (rest mass m and charge q) is given by:

Thus the particle's canonical momentum is

that is, the sum of the kinetic momentum and the potential momentum.
Solving for the velocity, we get

So the Hamiltonian is

This results in the force equation (equivalent to the Euler–Lagrange equation)

from which one can derive

The above derivation makes use of the vector calculus identity:

An equivalent expression for the Hamiltonian as function of the relativistic (kinetic) momentum, P = γmẋ(t) = p - qA, is

This has the advantage that kinetic momentum P can be measured experimentally whereas canonical momentum p cannot. Notice that the Hamiltonian (total energy) can be viewed as the sum of the relativistic energy (kinetic+rest), E = γmc2, plus the potential energy, V = eφ.
Mathematical structures
Geometry of Hamiltonian systems
The Hamiltonian can induce a symplectic structure on a smooth even-dimensional manifold M2n in several different, but equivalent, ways the best known among which are the following:[8]
As a closed nondegenerate symplectic 2-form ω. According to the Darboux's theorem, in a small neighbourhood around any point on M in suitable local coordinates exists the symplectic form


The local coordinates p, q are then called canonical or symplectic.
The form allows to construct a natural isomorphism of the tangent space and the cotangent space This is done by mapping a vector to the 1-form where for an arbitrary Due to the bilinearity and non-degeneracy of and the fact that the mapping is indeed a linear isomorphism. This isomorphism is natural in that it does not change with change of coordinates on Repeating for every we end up with an isomorphism between the infinite-dimensional space of smooth vector fields and that of smooth 1-forms. For every and

















(In algebraic terms, one would say that the -modules and are isomorphic). If then, for every fixed and is known as a Hamiltonian vector field. The respective differential equation on










is called Hamilton's equation. Here and is the (time-dependent) value of the vector field at



A Hamiltonian system may be understood as a fiber bundle E over time R, with the fibers Et, t ∈ R, being the position space. The Lagrangian is thus a function on the jet bundle J over E; taking the fiberwise Legendre transform of the Lagrangian produces a function on the dual bundle over time whose fiber at t is the cotangent space T∗Et, which comes equipped with a natural symplectic form, and this latter function is the Hamiltonian. The correspondence between Lagrangian and Hamiltonian mechanics is achieved with the tautological one-form.
Any smooth real-valued function H on a symplectic manifold can be used to define a Hamiltonian system. The function H is known as "the Hamiltonian" or "the energy function." The symplectic manifold is then called the phase space. The Hamiltonian induces a special vector field on the symplectic manifold, known as the Hamiltonian vector field.
The Hamiltonian vector field induces a Hamiltonian flow on the manifold. This is a one-parameter family of transformations of the manifold (the parameter of the curves is commonly called "the time"); in other words, an isotopy of symplectomorphisms, starting with the identity. By Liouville's theorem, each symplectomorphism preserves the volume form on the phase space. The collection of symplectomorphisms induced by the Hamiltonian flow is commonly called "the Hamiltonian mechanics" of the Hamiltonian system.
The symplectic structure induces a Poisson bracket. The Poisson bracket gives the space of functions on the manifold the structure of a Lie algebra.
If F and G are smooth functions on M then the smooth function ω2(IdG, IdF) is properly defined; it is called a Poisson bracket of functions F and G and is denoted {F, G}. The Poisson bracket has the following properties:
- bilinearity
- antisymmetry
- (Leibniz rule)
- (Jacobi identity)
- non-degeneracy: if the point x on M is not critical for F then a smooth function G exists such that .



Given a function f

if there is a probability distribution, ρ, then (since the phase space velocity has zero divergence and probability is conserved) its convective derivative can be shown to be zero and so


This is called Liouville's theorem. Every smooth function G over the symplectic manifold generates a one-parameter family of symplectomorphisms and if {G, H} = 0, then G is conserved and the symplectomorphisms are symmetry transformations.
A Hamiltonian may have multiple conserved quantities Gi. If the symplectic manifold has dimension 2n and there are n functionally independent conserved quantities Gi which are in involution (i.e., {Gi, Gj} = 0), then the Hamiltonian is Liouville integrable. The Liouville–Arnold theorem says that, locally, any Liouville integrable Hamiltonian can be transformed via a symplectomorphism into a new Hamiltonian with the conserved quantities Gi as coordinates; the new coordinates are called action-angle coordinates. The transformed Hamiltonian depends only on the Gi, and hence the equations of motion have the simple form

for some function F.[9] There is an entire field focusing on small deviations from integrable systems governed by the KAM theorem.
The integrability of Hamiltonian vector fields is an open question. In general, Hamiltonian systems are chaotic; concepts of measure, completeness, integrability and stability are poorly defined.
Riemannian manifolds
An important special case consists of those Hamiltonians that are quadratic forms, that is, Hamiltonians that can be written as

where ⟨ , ⟩q is a smoothly varying inner product on the fibers T∗
qQ, the cotangent space to the point q in the configuration space, sometimes called a cometric. This Hamiltonian consists entirely of the kinetic term.
If one considers a Riemannian manifold or a pseudo-Riemannian manifold, the Riemannian metric induces a linear isomorphism between the tangent and cotangent bundles. (See Musical isomorphism). Using this isomorphism, one can define a cometric. (In coordinates, the matrix defining the cometric is the inverse of the matrix defining the metric.) The solutions to the Hamilton–Jacobi equations for this Hamiltonian are then the same as the geodesics on the manifold. In particular, the Hamiltonian flow in this case is the same thing as the geodesic flow. The existence of such solutions, and the completeness of the set of solutions, are discussed in detail in the article on geodesics. See also Geodesics as Hamiltonian flows.
Sub-Riemannian manifolds
When the cometric is degenerate, then it is not invertible. In this case, one does not have a Riemannian manifold, as one does not have a metric. However, the Hamiltonian still exists. In the case where the cometric is degenerate at every point q of the configuration space manifold Q, so that the rank of the cometric is less than the dimension of the manifold Q, one has a sub-Riemannian manifold.
The Hamiltonian in this case is known as a sub-Riemannian Hamiltonian. Every such Hamiltonian uniquely determines the cometric, and vice versa. This implies that every sub-Riemannian manifold is uniquely determined by its sub-Riemannian Hamiltonian, and that the converse is true: every sub-Riemannian manifold has a unique sub-Riemannian Hamiltonian. The existence of sub-Riemannian geodesics is given by the Chow–Rashevskii theorem.
The continuous, real-valued Heisenberg group provides a simple example of a sub-Riemannian manifold. For the Heisenberg group, the Hamiltonian is given by

pz is not involved in the Hamiltonian.
Poisson algebras
Hamiltonian systems can be generalized in various ways. Instead of simply looking at the algebra of smooth functions over a symplectic manifold, Hamiltonian mechanics can be formulated on general commutative unital real Poisson algebras. A state is a continuous linear functional on the Poisson algebra (equipped with some suitable topology) such that for any element A of the algebra, A2 maps to a nonnegative real number.
A further generalization is given by Nambu dynamics.
Generalization to quantum mechanics through Poisson bracket
Hamilton's equations above work well for classical mechanics, but not for quantum mechanics, since the differential equations discussed assume that one can specify the exact position and momentum of the particle simultaneously at any point in time. However, the equations can be further generalized to then be extended to apply to quantum mechanics as well as to classical mechanics, through the deformation of the Poisson algebra over p and q to the algebra of Moyal brackets.
Specifically, the more general form of the Hamilton's equation reads

where f is some function of p and q, and H is the Hamiltonian. To find out the rules for evaluating a Poisson bracket without resorting to differential equations, see Lie algebra; a Poisson bracket is the name for the Lie bracket in a Poisson algebra. These Poisson brackets can then be extended to Moyal brackets comporting to an inequivalent Lie algebra, as proven by Hilbrand J. Groenewold, and thereby describe quantum mechanical diffusion in phase space (See the phase space formulation and the Wigner-Weyl transform). This more algebraic approach not only permits ultimately extending probability distributions in phase space to Wigner quasi-probability distributions, but, at the mere Poisson bracket classical setting, also provides more power in helping analyze the relevant conserved quantities in a system.
See also
- Canonical transformation
- Classical field theory
- Hamiltonian field theory
- Covariant Hamiltonian field theory
- Classical mechanics
- Dynamical systems theory
- Hamilton–Jacobi equation
- Hamilton–Jacobi–Einstein equation
- Lagrangian mechanics
- Maxwell's equations
- Hamiltonian (quantum mechanics)
- Quantum Hamilton's equations
- Quantum field theory
- Hamiltonian optics
- De Donder–Weyl theory
- Geometric mechanics
- Routhian mechanics
- Nambu mechanics
- Hamiltonian fluid mechanics
- Hamiltonian vector field
References
- Hand, L. N.; Finch, J. D. (2008). Analytical Mechanics. Cambridge University Press. ISBN 978-0-521-57572-0.
- Goldstein, Poole & Safko 2002, pp. 347–349
- "18.013A Calculus with Applications, Fall 2001, Online Textbook: 16.3 The Hamiltonian". ocw.mit.edu. MIT OpenCourseWare website. Retrieved 2018-09-10.
- Landau & Lifshitz 1976, pp. 33-34
- This derivation is along the lines as given in Arnol'd 1989, pp. 65–66
- Srednicki, Mark (January 2007). Quantum Field Theory. Cambridge Core. doi:10.1017/cbo9780511813917. ISBN 9780511813917. Retrieved 2020-05-08.
- Zinn-Justin, Jean; Guida, Riccardo (2008-12-04). "Gauge invariance". Scholarpedia. 3 (12): 8287. Bibcode:2008SchpJ...3.8287Z. doi:10.4249/scholarpedia.8287. ISSN 1941-6016.
- Arnol'd, Kozlov & Neĩshtadt 1988, §3. Hamiltonian mechanics.
- Arnol'd, Kozlov & Neĩshtadt 1988
Further reading
- Landau, Lev Davidovich; Lifshitz, Evgenii Mikhailovich (1976). Mechanics. Course of Theoretical Physics. 1. Sykes, J. B. (John Bradbury), Bell, J. S. (3rd ed.). Oxford. ISBN 0-08-021022-8. OCLC 2591126.
- Abraham, R.; Marsden, J.E. (1978). Foundations of mechanics (2d ed., rev., enl., and reset ed.). Reading, Mass.: Benjamin/Cummings Pub. Co. ISBN 0-8053-0102-X. OCLC 3516353.
- Arnol'd, V. I.; Kozlov, V. V.; Neĩshtadt, A. I. (1988). Mathematical aspects of classical and celestial mechanics. 3. Anosov, D. V. Berlin: Springer-Verlag. ISBN 0-387-17002-2. OCLC 16404140.
- Arnol'd, V. I. (1989). Mathematical methods of classical mechanics (2nd ed.). New York: Springer-Verlag. ISBN 0-387-96890-3. OCLC 18681352.
- Goldstein, Herbert; Poole, Charles P., Jr.; Safko, John L. (2002). Classical mechanics (3rd ed.). San Francisco: Addison Wesley. ISBN 0-201-31611-0. OCLC 47056311.
- Vinogradov, A. M.; Kupershmidt, B A (1977-08-31). "The structure of Hamiltonian mechanics". Russian Mathematical Surveys. 32 (4): 177–243. doi:10.1070/RM1977v032n04ABEH001642. ISSN 0036-0279.
External links
| Wikimedia Commons has media related to Hamiltonian mechanics. |
- Binney, James J., Classical Mechanics (lecture notes) (PDF), University of Oxford, retrieved 27 October 2010
- Tong, David, Classical Dynamics (Cambridge lecture notes), University of Cambridge, retrieved 27 October 2010
- Hamilton, William Rowan, On a General Method in Dynamics, Trinity College Dublin