Memory management
Memory management is a form of resource management applied to computer memory. The essential requirement of memory management is to provide ways to dynamically allocate portions of memory to programs at their request, and free it for reuse when no longer needed. This is critical to any advanced computer system where more than a single process might be underway at any time.[1]
| Operating systems |
|---|
 |
| Common features |
Several methods have been devised that increase the effectiveness of memory management. Virtual memory systems separate the memory addresses used by a process from actual physical addresses, allowing separation of processes and increasing the size of the virtual address space beyond the available amount of RAM using paging or swapping to secondary storage. The quality of the virtual memory manager can have an extensive effect on overall system performance.
Details
In some operating systems, e.g., DOS/360 and successors, OS/360 and successors,[2]:74 allocation of storage within an address space is handled by the operating system; in, e.g., Unix-like operating systems, allocation within an address space is at the application level.
Memory management within an address space is generally categorized as either automatic memory management, usually involving garbage collection, or manual memory management.
Dynamic memory allocation
The task of fulfilling an allocation request consists of locating a block of unused memory of sufficient size. Memory requests are satisfied by allocating portions from a large pool of memory called the heap or free store.[note 1] At any given time, some parts of the heap are in use, while some are "free" (unused) and thus available for future allocations.
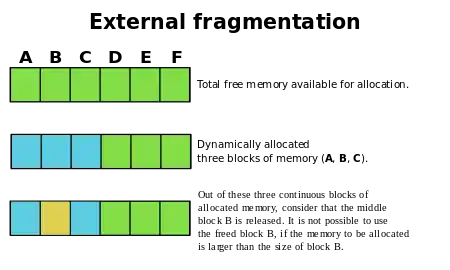
Several issues complicate the implementation, such as external fragmentation, which arises when there are many small gaps between allocated memory blocks, which invalidates their use for an allocation request. The allocator's metadata can also inflate the size of (individually) small allocations. This is often managed by chunking. The memory management system must track outstanding allocations to ensure that they do not overlap and that no memory is ever "lost" (i.e., that there are no "memory leaks").
Efficiency
The specific dynamic memory allocation algorithm implemented can impact performance significantly. A study conducted in 1994 by Digital Equipment Corporation illustrates the overheads involved for a variety of allocators. The lowest average instruction path length required to allocate a single memory slot was 52 (as measured with an instruction level profiler on a variety of software).[3]
Implementations
Since the precise location of the allocation is not known in advance, the memory is accessed indirectly, usually through a pointer reference. The specific algorithm used to organize the memory area and allocate and deallocate chunks is interlinked with the kernel, and may use any of the following methods:
Fixed-size blocks allocation
Fixed-size blocks allocation, also called memory pool allocation, uses a free list of fixed-size blocks of memory (often all of the same size). This works well for simple embedded systems where no large objects need to be allocated, but suffers from fragmentation, especially with long memory addresses. However, due to the significantly reduced overhead this method can substantially improve performance for objects that need frequent allocation / de-allocation and is often used in video games.
Buddy blocks
In this system, memory is allocated into several pools of memory instead of just one, where each pool represents blocks of memory of a certain power of two in size, or blocks of some other convenient size progression. All blocks of a particular size are kept in a sorted linked list or tree and all new blocks that are formed during allocation are added to their respective memory pools for later use. If a smaller size is requested than is available, the smallest available size is selected and split. One of the resulting parts is selected, and the process repeats until the request is complete. When a block is allocated, the allocator will start with the smallest sufficiently large block to avoid needlessly breaking blocks. When a block is freed, it is compared to its buddy. If they are both free, they are combined and placed in the correspondingly larger-sized buddy-block list.
Slab allocation
This memory allocation mechanism preallocates memory chunks suitable to fit objects of a certain type or size.[4] These chunks are called caches and the allocator only has to keep track of a list of free cache slots. Constructing an object will use any one of the free cache slots and destructing an object will add a slot back to the free cache slot list. This technique alleviates memory fragmentation and is efficient as there is no need to search for a suitable portion of memory, as any open slot will suffice.
Stack allocation
Many Unix-like systems as well as Microsoft Windows implement a function called alloca for dynamically allocating stack memory in a way similar to the heap-based malloc. A compiler typically translates it to inlined instructions manipulating the stack pointer.[5] Although there is no need of manually freeing memory allocated this way as it is automatically freed when the function that called alloca returns, there exists a risk of overflow. And since alloca is an ad hoc expansion seen in many systems but never in POSIX or the C standard, its behavior in case of a stack overflow is undefined.
A safer version of alloca called _malloca, which reports errors, exists on Microsoft Windows. It requires the use of _freea.[6] gnulib provides an equivalent interface, albeit instead of throwing an SEH exception on overflow, it delegates to malloc when an overlarge size is detected.[7] A similar feature can be emulated using manual accounting and size-checking, such as in the uses of alloca_account in glibc.[8]
Automatic variables
In many programming language implementations, all variables declared within a procedure (subroutine, or function) are local to that function; the runtime environment for the program automatically allocates memory for these variables on program execution entry to the procedure, and automatically releases that memory when the procedure is exited. Special declarations may allow local variables to retain values between invocations of the procedure, or may allow local variables to be accessed by other procedures. The automatic allocation of local variables makes recursion possible, to a depth limited by available memory.
Garbage collection
Garbage collection is a strategy for automatically detecting memory allocated to objects that are no longer usable in a program, and returning that allocated memory to a pool of free memory locations. This method is in contrast to "manual" memory management where a programmer explicitly codes memory requests and memory releases in the program. While automatic garbage has the advantages of reducing programmer workload and preventing certain kinds of memory allocation bugs, garbage collection does require memory resources of its own, and can compete with the application program for processor time.
Systems with virtual memory
Virtual memory is a method of decoupling the memory organization from the physical hardware. The applications operate on memory via virtual addresses. Each attempt by the application to access a particular virtual memory address results in the virtual memory address being translated to an actual physical address. In this way the addition of virtual memory enables granular control over memory systems and methods of access.
In virtual memory systems the operating system limits how a process can access the memory. This feature, called memory protection, can be used to disallow a process to read or write to memory that is not allocated to it, preventing malicious or malfunctioning code in one program from interfering with the operation of another.
Even though the memory allocated for specific processes is normally isolated, processes sometimes need to be able to share information. Shared memory is one of the fastest techniques for inter-process communication.
Memory is usually classified by access rate into primary storage and secondary storage. Memory management systems, among other operations, also handle the moving of information between these two levels of memory.
Memory management in OS/360 and successors
IBM System/360 does not support virtual memory.[note 2] Memory isolation of jobs is optionally accomplished using protection keys, assigning storage for each job a different key, 0 for the supervisor or 1–15. Memory management in OS/360 is a supervisor function. Storage is requested using the GETMAIN macro and freed using the FREEMAIN macro, which result in a call to the supervisor (SVC) to perform the operation.
In OS/360 the details vary depending on whether the system is generated for PCP, MFT or MVT.
In OS/360 MVT, suballocation within a job's region or the shared System Queue Area (SQA) is based on subpools, areas a multiple of 2 KB in size—the size of an area protected by a protection key. Subpools are numbered 0–255, plus an unnumbered subpool used to store loaded programs.[2] Within a region subpools are assigned either the job's storage protection or the supervisor's key, key 0. Subpools 0–126 receive the job's key. Initially only the unnumbered subpool and subpool zero are created, and all user storage requests are satisfied from subpool 0, unless another is specified in the memory request. Subpools 250–255 are created by memory requests by the supervisor on behalf of the job. Most of these are assigned key 0, although a few get the key of the job. MFT uses fixed partitions redefinable by the operator instead of dynamic regions and PCP has only a single partition.
Each subpool is mapped by a list of control blocks identifying allocated and free memory blocks within the subpool. Memory is allocated by finding a free area of sufficient size, or by allocating additional blocks in the subpool, up to the region size of the job. It is possible to free all or part of an allocated memory area.[9]
The details for OS/VS1 are similar to those for MFT and the details for OS/VS2 are similar to those for MVT, except that the page size is 4 KiB. For both OS/VS1 and OS/VS2 the shared System Queue Area (SQA) is nonpageable.
In MVS the address space includes an additional pageable shared area, the Common Storage Area (CSA), and an additional private area, the System Work area (SWA). Also, the storage keys 0-7 are all reserved for use by privileged code.
Notes
- Not to be confused with the unrelated heap data structure.
- Except on the Model 67
References
- Gibson, Steve (August 15, 1988). "Tech Talk: Placing the IBM/Microsoft XMS Spec Into Perspective". InfoWorld.
- IBM Corporation (1965). IBM Operating System/360 Concepts and Facilities (PDF). p. 75. Retrieved Apr 3, 2019.
- Detlefs, D.; Dosser, A.; Zorn, B. (June 1994). "Memory allocation costs in large C and C++ programs" (PDF). Software: Practice and Experience. 24 (6): 527–542. CiteSeerX 10.1.1.30.3073. doi:10.1002/spe.4380240602.
- Silberschatz, Abraham; Galvin, Peter B. (2004). Operating system concepts. Wiley. ISBN 0-471-69466-5.
- – Linux Programmer's Manual – Library Functions
- "_malloca". Microsoft CRT Documentation.
- "gnulib/malloca.h". GitHub. Retrieved 24 November 2019.
- "glibc/include/alloca.h". Beren Minor's Mirrors. 23 November 2019.
- IBM Corporation (May 1973). Program Logic: IBM System/360 Operating System MVT Supervisor (PDF). pp. 107–137. Retrieved Apr 3, 2019.
Further reading
- Donald Knuth. Fundamental Algorithms, Third Edition. Addison-Wesley, 1997. ISBN 0-201-89683-4. Section 2.5: Dynamic Storage Allocation, pp. 435–456.
- Simple Memory Allocation AlgorithmsArchived 5 March 2016 at the Wayback Machine (originally published on OSDEV Community)
- Wilson, P. R.; Johnstone, M. S.; Neely, M.; Boles, D. (1995). "Dynamic storage allocation: A survey and critical review". Memory Management. Lecture Notes in Computer Science. 986. pp. 1–116. CiteSeerX 10.1.1.47.275. doi:10.1007/3-540-60368-9_19. ISBN 978-3-540-60368-9.
- Berger, E. D.; Zorn, B. G.; McKinley, K. S. (June 2001). "Composing High-Performance Memory Allocators". Proceedings of the ACM SIGPLAN 2001 conference on Programming language design and implementation (PDF). pp. 114–124. CiteSeerX 10.1.1.1.2112. doi:10.1145/378795.378821. ISBN 1-58113-414-2. S2CID 7501376.
- Berger, E. D.; Zorn, B. G.; McKinley, K. S. (November 2002). "Reconsidering Custom Memory Allocation". Proceedings of the 17th ACM SIGPLAN conference on Object-oriented programming, systems, languages, and applications (PDF). pp. 1–12. CiteSeerX 10.1.1.119.5298. doi:10.1145/582419.582421. ISBN 1-58113-471-1. S2CID 481812.
- Wilson, Paul R.; Johnstone, Mark S.; Neely, Michael; Boles, David (September 28–29, 1995), Dynamic Storage Allocation: A Survey and Critical Review (PDF), Austin, Texas: Department of Computer Sciences University of Texas, retrieved 2017-06-03
External links
| Wikibooks has more on the topic of: Memory management |
