Vector addition system
A vector addition system (VAS) is one of several mathematical modeling languages for the description of distributed systems. Vector addition systems were introduced by Richard M. Karp and Raymond E. Miller in 1969,[1] and generalized to vector addition systems with states (VASS) by John E. Hopcroft and Jean-Jacques Pansiot in 1979.[2] Both VAS and VASS are equivalent in many ways to Petri nets introduced earlier by Carl Adam Petri.
Informal definition
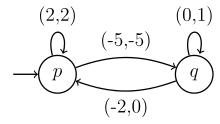
A vector addition system consists of a finite set of integer vectors. An initial vector is seen as the initial values of multiple counters, and the vectors of the VAS are seen as updates. These counters may never drop below zero. More precisely, given an initial vector with non negative values, the vectors of the VAS can be added componentwise, given that every intermediate vector has non negative values. A vector addition system with states is a VAS equipped with control states. More precisely, it is a finite directed graph with arcs labelled by integer vectors. VASS have the same restriction that the counter values should never drop below zero.
Formal definitions and basic terminology
- A VAS is a finite set for some .
- A VASS is a finite directed graph such that for some .





Transitions
- Let be a VAS. Given a vector , the vector can be reached, in one transition, if and .
- Let be a VASS. Given a configuration , the configuration can be reached, in one transition, if and .







See also
References
- Karp, Richard M.; Miller, Raymond E. (May 1969). "Parallel program schemata". Journal of Computer and System Sciences. 3 (2): 147–195. doi:10.1016/S0022-0000(69)80011-5.
- Hopcroft, John E.; Pansiot, Jean-Jacques (1979). "On the reachability problem for 5-dimensional vector addition systems". Theoretical Computer Science. 8 (2): 135–159. doi:10.1016/0304-3975(79)90041-0. hdl:1813/6102.
