Speed Dreams
Speed Dreams, often shortened to SD and formerly known as Torcs-NG, is a free and open source 3D racing video game for Linux, Microsoft Windows, AmigaOS 4, AROS, MorphOS and Haiku. Started in 2008 as a fork of the racing car simulator TORCS,[2] it is mainly written in C++ and released under GPL v2+ and Free Art License, the most recent release being version 2.2 of March 2016.
 | |
| Developer(s) | The Speed Dreams Team |
|---|---|
| Initial release | 27 March 2010 |
| Stable release | 2.2.2
/ 4 November 2018[1] |
| Written in | C++, C, XML |
| Operating system | Linux, Microsoft Windows, AmigaOS 4, AROS, MorphOS, Haiku |
| Size | 966.1 MB |
| Available in | English |
| Type | Racing simulation |
| License | GNU General Public License (code), Free Art License (artwork) |
| Website | www |
The development of an accurate driving behaviour, with different physics engines available, sets the project among the few open source racing simulation codebases.[lower-alpha 1]
Speed Dreams can be played with a variety of input devices, including keyboards, mouses, joypads, joysticks, racing wheels and pedals.[3]
Gameplay
Racing modes
Speed Dreams features several different racing modes; while some offer greater customization than others, most generally try to reproduce real types of races.[4] Complex events, such as various categories of championships or endurance races, are also available. Because racing modes are defined by plain-text configuration files, custom ones can be freely created. In this context the most relevant change since TORCS − introduced in Speed Dreams 2.0 − is the "Career" mode: here the player can compete with different car classes, during multiple seasons, on randomly selected tracks and against balanced random opponents, earning points in championship rankings. Within practice mode, since version 1.4.0, it is possible to run robot races in the "results-only" mode, that is, ignoring the graphics display of the race; this allows the simulation to be run at a speed limited only by the computing power available, and is mostly used by robot developers.[4] For the same purpose version 2.0 provides also a text-only mode: the race is run without graphics − no hardware acceleration being required − and the results are displayed through a command-line interface.[5]
| Synopsis of racing modes that are officially released in version 2.0 | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Name | Cars range | Tracks range | Drivers range | Race length | Qualification session | Multiple race sessions | Time of day | Sky conditions | Rainfall[lower-roman 1] | Results-only mode | Results menu |
| Practice | All | All | All, only one at a time | Any | No | No | Custom | Custom | Custom | Yes (robot drivers only) | Complete lap-by-lap information |
| Quick race | All | All | All, up to 40 at a time | Any | No | No | Custom | Custom | Custom | No | Driver-by-driver information |
| Single event - Endurance | All | All | All, up to 50 at a time | Fixed: 500 km | Yes, customizable length | No | Custom | Custom | Custom | No | Driver-by-driver information |
| Single event - Challenge | All | All | All, up to 50 at a time | Fixed: 50 km (sprint), 180 km (main race) | Yes, customizable length | Two races: sprint and main race | Custom | Custom | Custom | No | Driver-by-driver information |
| Single event - Category-specific challenge | All cars within the given category (MP5, 36 GP or LS-GT1) | All | All drivers within the given car category | Any | Yes, customizable length | Depending on category chosen | Fixed | Custom | Custom | No | Driver-by-driver information |
| Championship - All classes | All | Fixed | All, up to 50 at a time | Fixed | Yes, fixed length (3 laps) | Yes, multiple race days on different tracks | Custom | Custom | Custom | No | Driver-by-driver information |
| Championship - category-specific | All cars within the given category (Supercars, TRB1, MP5, 36GP, LS-GT1) | Fixed | All drivers within the given car category | Custom | Yes, customizable length | Yes, multiple race days on different tracks | Custom | Custom | Custom | No | Driver-by-driver information |
| Career | Automatic choice | Automatic choice | Automatic choice of robots driving all cars from the same category as player's | Fixed | Yes, fixed length (3 laps) | Yes, multiple race days on different tracks and with different car categories | Custom | Custom | Custom | Possibility to skip practice sessions; forced results-only mode for AI robots' qualifications | Driver-by-driver information |
| |||||||||||
Weather
Speed Dreams 2.0 introduced the simulation of a real sky dome, along with customizable weather conditions: the user can choose the time of day, the cloud cover and the intensity of rainfall to have during the race. The sky dome can be set up as dynamic, namely simulating the succession of day and night and the movement of celestial bodies. Weather simulation affects both physics, with proper corrections to the cars' adherence, and graphics, with animated cloud layers, and if necessary a 2D overlay of rain particles.

Physics
Speed Dreams can load different physics engines to use during races. Written in C++, they are software modules executed at every simulation frame to compute the cars' parameters such as position, speed, damage, collisions, suspensions. The user is able to select the physics engine before every race; currently available are:

| Name | Description |
|---|---|
| SimuV2 | The original TORCS pseudo-3D physics[lower-alpha 2] with some backports from SimuV2.1 and SimuV3.[6] |
| SimuV2.1 | New version of SimuV2 with some improvements; it is the official physics engine for Speed Dreams 2.0, upon which cars parameters are set up.[7][8][9] |
| SimuV3 | 3D physics engine.[10][11][12] |
| SimuV4 | New in release 2.1.[13] |
All Speed Dreams physics engines feature real-time car collisions based on the SOLID library.[14][6] Each car model defines a bounding box according to which the physics engine detects side and bottom collisions; these produce car damages, computed on a scale ranging from 0 to 10000; damages affect only cars' performances, without producing any graphical output. A car with more than 10000 damage points is excluded from the race.[15]
Sound
Sound management is achieved through OpenAL or, optionally, PLIB. Audible sounds include collision and tire screeching noise, in addition to the engine's; there are simulated also complex effects such as attenuation and Doppler shift. In 2011, the professional sound production company audioberlin reworked the default Speed Dreams sounds; the improved versions are included in release 2.0.0.[16]

Racing interfaces
While racing, the player is offered a customizable 2D cockpit displaying various gauges, lap times information and a dynamic mini-map. Every instrument features several modes, among which the player can choose while racing in order to change the appearance, or even completely hide the interface. A rear mirror is also available, although quite expensive in terms of consumed computing power.[17] An "arcade" mode, legacy of TORCS, is still maintained as of version 2.0; according to the authors of the Italian manual for TORCS, it is more suitable for the novice player of Speed Dreams.[18] New addition to Speed Dreams is the Formula One-style timer with an accuracy of a millisecond (ten times more precise than TORCS' one).
AI
TORCS was born with focus set more on AI racing than on human driving. Speed Dreams, according to the project's description, shifted the balance towards a more user-oriented racing experience.[2] Nonetheless, unlike the fate of the other legacy content, reworked but mostly maintained, in late 2009 all the robot engines inherited from TORCS were removed and replaced by new, more advanced ones.
General description
Speed Dreams features computer-controlled opponents to race against, commonly called "robots". These are software modules, written in C++, which control the behaviour of cars during any kind of practice, qualification or race session.[19] A module can virtually handle any number of single robot drivers; these share the source code but may have custom car setups and liveries, and even drive different cars. Robots may be programmed with any kind of function in order to compute racing variables: throttle, brake, steer, gearbox and clutch.[20] These values are sent to the race engine by an open interface of Speed Dreams. Human players are treated just like any other robot:[21] their variables are controlled by user-defined input devices and can be influenced by automated driving aids such as ABS, TCS or speed limiter for pit-stops.
Available robots
Speed Dreams 2.0 features 3 official robot engines, for a grand total of about 150 drivers competing in all the official car categories:
| Name | Description | Author |
|---|---|---|
| Simplix | Described as "cautious and not too aggressive", Simplix robots won the 2008 and 2009 seasons of the TORCS world endurance championship. As of 2.0.0 release, it's the only robot engine able to drive on different weather conditions.[22] | Wolf-Dieter Beelitz |
| USR | Based on K1999 racing line computation algorithm, USR robots won the 2007 season of the TORCS world endurance championship. USR driving style is defined as "aggressive and very entertaining" by the Speed Dreams development team.[22] | Andrew Sumner |
| kilo2008 | Based on a heavily modified version of the "Locus" robot tutorial by Andrew Sumner, kilo2008 attended the 2008 and 2009 seasons of the TORCS world endurance championship.[22] | Gábor Kmetyko |
Robots from the 1936 GP car series are named after real drivers of that period; the names of most other robots are fictitious, although many names of Speed Dreams developers and contributors appear, mostly in the Torcs Racing Board 1 category.[23]
Common robot functions
Robots shipped within Speed Dreams share some kinds of behavioural functions in order to achieve realism in the driving simulation. While being loaded, robots compute a racing line, which depends on the track's XML description. Initial fuel amount, conforming to a fuel and pit-stop strategy, is also estimated and requested to the race engine. During the race robots aim at following the racing line; however their behaviour can be influenced by the parameters received by the race engine; these include the position and the speed of other cars, which is taken into account by collision-avoidance and overtaking algorithms.[19] Robots also have learning capability: they can improve their lap times basing on previously driven laps. A function to regain the track after accidents is also implemented in all official robot engines.[24] Speed Dreams robots can handle a so-called "skilling" parameter, defined by the player: this way the user can alter the robots' performance and therefore their lap times.[25][26][27][8]
Pit stops
As of release 2.0, the pit stop simulation system remains unchanged from TORCS. When racing on tracks equipped with a pit lane, drivers are assigned a pit stop emplacement according to their position on the starting grid. Since most tracks don't provide enough emplacements for all the race competitors, robot drivers support pit stop sharing. To trigger pit stops, robots have to drive near their emplacement at sufficiently slow speed, then make the stop request to the race engine, which captures the car and keeps it still and unresponsive until the end of the process.[28] The human robot automatically sends the request as soon as the other conditions are satisfied;[29] the simulation is then paused, while the player is offered a menu where he can choose the parameters of the stop.[30] Services offered during pit stops are repairing damage, refuelling and serving penalties;[15] the stop's duration is automatically defined and depends on the amount of damage and of fuel to deal with. During pit stops no graphical animation is displayed.

Multiplayer
The "split-screen" feature allows to split the display − on the same monitor − into up to four regions which act independently: these can show the perspective of different cameras, with different interface settings and following different drivers. During the race the regions can be dynamically created, deleted and arranged in several different layouts. On the human racer's side this system allows up to four players to simultaneously compete in the same race using the same PC.[31]
An on-line multiplayer mode was developed for version 2.0, but wasn't included in the official release because it was not yet fully stable.[32]
Penalties
Speed Dreams has inherited from TORCS a per-driver penalty system. Penalties are triggered by violations to pit lane rules: breaking the speed limit in the pit lane (90 km/h) results in a drive-through penalty, while crossing the pit lane border produces a stop-and-go penalty. Penalties have to be cleared within five laps since the notification; disobeying drivers are automatically excluded from the race.[33]
Cameras
Several different camera modes are available, covering different cockpit and outside views. The "TV director" camera mode makes use of segment-by-segment cameras defined by each track, automatically focusing on interesting events of a race. Each camera mode can be independently zoomed in and out. No free camera is available as of version 2.0.
Time warping
Speed Dreams inherited from TORCS the possibility to accelerate and slow down the simulation; release 2.0 of the project extended this feature so that, while keeping constant the actual duration of the simulated frame, the rendered simulation speed could range from 64 times slower to 16 times faster than default, with increment steps of powers of 2.[34] To achieve such acceleration, more frames have to be rendered within the same actual time:[35] hence the accordingly higher computing power required by this feature.
Content
The whole artwork shipped since version 1.4.0 is licensed under the Free Art License.
File formats
Speed Dreams makes an extensive use of plain-text files throughout its content. Used to define settings for cars (about 200 customizable values), tracks, in-game menus, game options and robot engines, XML markup accounts for about 40% of the whole project's code. As for 3D models, there was maintained the .acc format, TORCS evolution of the equally plain-text .ac format from AC3D allowing smoothing and shadow mapping on the model. Although changes to the file formats introduced new features, backward compatibility was preserved: Speed Dreams can load cars, tracks and robots designed for TORCS. The opposite is only partially true, as TORCS can't handle the unknown parameters from Speed Dreams.
Car features


Speed Dreams inherited from TORCS the handling of some graphics features such as custom 3D wheels, working lights (front, rear, brake and reverse) and glowing brake disks;[36] new features introduce support for animated drivers and steering wheels, first used on the 1936 Grand Prix class cars, and improved environment mapping for more realistic reflections. As there isn't support for dynamic shading, each car defines a shadow image that is projected under the car's model. Several levels of detail are supported for each car model in order to improve simulation performance, although − for size reasons − the official release ships only one. Since version 2.0 the user is enabled to choose among different liveries for each car, which affect the car's exterior paint, wheels and interior appearance.[37][38] About 250 liveries, between player and robots skins, are shipped with the 2.0.0 release. A static preview of the car's appearance is displayed during the car's selection: a special "garage" track was created with the purpose of shooting preview images.[39][40]
Available cars
Available cars are grouped into categories, usually containing 6 to 8 models of comparable performances and size. Release 2.0 features 44 official cars spread among 6 categories:
| Category name | Description |
|---|---|
| 1936 Grand Prix | Cars from the pre-World War II era of Grand-Prix racing |
| TORCS Racing Board 1 | Highly modified version of the original TRB1 car set from TORCS |
| Supercars | A set of six sports cars in their production state, meant to introduce novice drivers into Speed Dreams |
| Long Day Series GT1 | Top-end sports cars modified for endurance racing, modeled after the real-world GT1 class |
| Long Day Series GT2 | Other sport cars with less engine power |
| Monoposto 5 | Loosely based on the British Formula Ford specifications |
| World Rally Series | Offroad/Rally cars still under development |
There are 26 more cars under development inside Speed Dreams' SVN repository, covering various classes of open wheel racing.
Some models available in Speed Dreams, and especially the content inherited from TORCS, are inspired from the design of existing racing cars; in order to avoid possible legal issues, the names of manufacturers, of brands and of models were replaced by fictional ones before release 1.4.0.[41]

External tools
The Torcs Car Setup Editor, generally shortened to TCSE, is a cross-platform program written in C++ by Vicente Martí Centelles; it allows to set up all the car's XML parameters from a graphical interface; it can automatically compute many values, draw different charts of the car's performance and display a 3D dynamic preview of the car's appearance.[42]
Tracks
Track system description
A Speed Dreams track is defined as a list of segments: straights and left/right turns.[43][44] Every segment is divided into four sections: main track, sides, borders and barriers. These sections are customizable in terms of width, graphics, physics behaviour, etc.[45] Track segments are split into more sub-segments in order to get a smoother result on the graphics and on the physics side through interpolation.[43][44] As a result of this segment-based structure, tracks are limited by left and right boundaries: the physics engine restricts the area where cars can be driven so that no car can actually cross the boundaries, except while being excluded from the race, when it is no more subject to physics. As of release 2.0.0-rc1, Speed Dreams supports only a fixed width value for the "main track" section; variable width is simulated by properly tweaks to borders and sides, which instead offer customizable width.[46]
Available track categories
Traditionally, TORCS tracks had been divided in 3 categories: road, dirt and oval; the Grand Prix Circuits category was newly introduced in Speed Dreams to gather the available race tracks. Release 2.0 of Speed Dreams offers 44 official tracks spread among 4 categories:
| Category name | Description |
|---|---|
| Road tracks | Tracks laid out on fictional public roads, in a wide variety of environments |
| Speedways | Oval tracks with an asphalt surface |
| Grand Prix Circuits | Race tracks, both fictional and designed after real tracks layouts, with a rich 3D environment. |
| Dirt tracks | Short and bumpy tracks with dirt or ice surfaces |
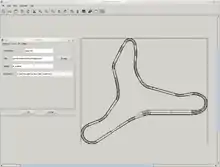
External tools
Text files describing the track's structure and 3D model are often too intricate to be edited as plain text; hence the need of external tools developed to help with track creation. The most popular graphical track editor, originally developed for TORCS in Java by Charalampos Alexandropoulos, features slider widgets to edit most parameters and a real-time 2D preview of the track's wireframe appearance; as a downside, it doesn't support parameters newly introduced in Speed Dreams, such as the ones related to the dynamic sky dome. A new track editor, by Mart Kelder of the Speed Dreams team, is under development inside the SVN repository of the main project. The track's 3D description is a plain text AC/ACC file usually generated by a command-line script named trackgen. This tool supports the use of heightmaps and object maps to enhance the quality of the final result. Official tracks of the Speed Dreams 2.0 release feature baked (static) shadow mapping, achieved using trackgen in conjunction with external 3D computer graphics software. While the .AC format is natively handled by the AC3D software, an ACC importing/exporting script makes Blender a common choice among designers for providing tracks with complex objects. An application for automated track generation, named "Interactive Track Generator for TORCS and Speed Dreams", was developed at the Dipartimento di Elettronica e Informazione (ICT) of the Italian Politecnico di Milano university. The project aims at applying evolutionary computing, through the use of genetic programming, for a procedural generation of TORCS/Speed Dreams tracks. The generator was tuned with the help of human interaction and produces a continuous on-line stream of new track outlines, each with a set of different scenarios available.
Development
| System requirements | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Requirements
As of version 2.0, Speed Dreams still relies on OpenGL 1.3 for rendering. Due to the new graphical and physical features, computing power required has risen compared to TORCS. Yet, the use of PLIB, which doesn't need support for OpenGL 2, still lets Speed Dreams run on old - back to 2001 - video cards. In order to increase the performance of the simulation, dual threading was introduced in version 1.4.0: dividing the simulation work between a physics and a graphics thread allows the program to take advantage from multi-core CPUs.
Underlying software
The core architecture, which is still quite the same of TORCS, features a flexible structure that loads as separated modules the components of the simulation, such as the physics, graphics and robot engines. The graphics engine, PLIB's SimpleSceneGraph, offers high-level access to OpenGL functions; PLIB is also a possible choice to deal with sound, the other one − selectable by the user − being OpenAL. Another legacy from TORCS was the need of freealut, which was removed after version 1.4.0. An SDL-port of the code, in order to get rid of the need of freeglut, was active from October 2008 to February 2010, when it was merged with the main project's trunk; however, in some distributions freeglut still figures as a dependency for the Speed Dreams packages. The ENet library was used during the development of network play; while this feature was not released in version 2.0.0, it remained as a dependency in most packages. In the first months since the project's birth, the build system was moved from make to the more advanced CMake.
The project
According to the community leaders, the project was born as a reaction to the slow development pace and the lack of willingness to integrate some new features, like Force Feedback, into TORCS code. At start the team was composed by only two developers, both from France; by the end of 2008 it had been joined by 5 more members, mostly old TORCS contributors who shared the above frustration. Accessions didn't cease during the following years, and release 2.0 was issued by an international development team numbering 12 people from 8 countries and 3 continents.[47]

History
The content of the r1-3-1 branch of the TORCS CVS repository was forked into a new SVN repository on 14 September 2008.[48][49] At first the name chosen for the project was "Torcs-NG" (Next Generation). After a year of development, in August 2009 the development team decided to sever ties with the parent project: there followed a long discussion about a new name to adopt, in which "Speed Dreams" was selected by means of a developer community vote.[50][51] The "non-free" content inherited from TORCS was also moved to an unmaintained "legacy" branch and replaced with new cars, tracks and robot engines.[52] The first public release was then issued on March 27, 2010 as "Speed Dreams 1.4.0", preserving the old versioning system of TORCS.[53][54] However, for some reason, the release wasn't publicly advertised until April 14;[55] five days later, the number of daily downloads reached 4,120. The development of the next version was started immediately after the release, and four months later the first alpha of Speed Dreams 2.0 was issued. According to the release plan, the final release should have been delivered by the end of 2010;[56] however, development progressed more slowly than expected, and only after 18 months, 5 development releases and more than 2,000 code changes a release candidate of version 2.0 was issued (January 15, 2012).[57] The final version was finally released on April 8, 2012,[58] the most prominent improvements being reworked reflections and menus, and the introduction of Career mode, dynamic weather, SimuV2.1 and dual-threading.[59] Again, the official announcement came with a delay of some weeks;[60] download figures started rising only after advertising began (25 April 2012)[61] and reached about 500/day.
Community
Among the declared aims of the project, since its start, was a particular care to the players community, namely taking more into account the feedback and suggestions of the end-users;[2] for this reason, a number of new communication channels were opened. First were the user and developer mailing lists on SourceForge.net: created along with the main project, they remain by far the most used channel, the speed-dreams-devel list having reached a milestone of 10,000 messages on March 16, 2012;[lower-alpha 3] there followed public forums on SourceForge.net, which, however, were never widely used; an official Twitter account was created two weeks before the release of version 1.4.0: as of May 2012, it is followed by 147 subscribers and has sent 124 tweets. In the end of 2011, the project created official pages on the popular social networks Facebook and Google+.
Distribution and packaging
Official releases include a source code package and a Windows installer.[62] However, Linux users aren't forced to compile the source code: binary packages are available, either provided within a distribution or through external repositories. The first package made available was an Ubuntu .deb of version 1.4.0, created by PlayDeb.net. As it didn't get updated for development releases of version 2.0, the Speed Dreams team created an official PPA on Launchpad; as of May 2012, Speed Dreams is packaged for the following distributions:
| Distribution name | Notes |
|---|---|
| Ubuntu | PlayDeb.net (2.0.0),[63] official Launchpad PPA (latest development release)[64] |
| Debian | User-built package on SourceForge.net (1.4.0)[65] |
| Arch Linux | "Community" repository (2.0.0 i686 and x86_64) [66] |
| Mageia | Provided with Mageia's development release Cauldron (2.0.0)[67] |
| Fedora | Official 1.4.0 packages for Mandriva have been reported to work fine;[68] An RPM source package of version 2.0.0 is also available.[69] |
| Slackware | Packages provided by SlackBuilds.org (2.0.0-rc1)[70] |
| Frugalware | Build files − allowing to compile the source code − provided since version 1.6 (1.4.0)[71] |
| Gentoo | ebuild provided within Gentoo repository (1.4.0)[72] |
| openSUSE | Packages provided by the openSUSE build service (2.0.0)[73] |
| live.linuX-gamers.net | Provided on the live DVD of the gaming distribution linuX-gamers.net (1.4.0)[74] |
A port of version 1.4.0 for the Haiku operating system was reported in August 2010 and was made available on Haikuware.com in April 2011; according to the packager, only minor changes to the code were needed to get Speed Dreams running.[75][76]
Speed Dreams was made available also on the digital distribution platform Desura in March 2012.[77] This platform was the first to publish the Windows binary packages for version 2.0, just two days after they were officially released. As of 10 May 2012, the project is ranked 276 out of 6,558 projects.[78]
Commercial redistribution
In April 2012 the development team was made aware of a commercial derivative of Speed Dreams. Initially believed to be a clone of TORCS, the product - published by the German company jalada GmbH - had been rebranded as jalada Ultimate Racing and sold for 12.09 € since August 2011.[79] The publisher claimed features such as force feedback support, and a Mac OS X port available at the same price. Although the GNU General Public License allows reselling of free software, this commercial redistribution doesn't comply with the requirement of express attribution to the original authors which is stated by the Free Art License, applied to the whole artwork of Speed Dreams.
Critical reception
Speed Dreams has received a wide variety of reviews, on technology websites, distribution platforms and open source software websites. Immediately after the release of version 1.4.0, Speed Dreams reached the first place in the "les plus populaires" ("the most popular") user ranking on the French free gaming portal JeuxLibres.net;[80] as of April 2012, the project still maintains the second place. Published in the November 7, 2011 issue of the German computer magazine c't, a review of Speed Dreams 2.0-beta1 pointed out the quality of cars' physics and race balancing.[81][82] In 2011, Speed Dreams was among the 23 candidates for the "Mejor juego libre" ("Best free game") prize by PortalProgramas, achieving the 13th place.[83][84] As of May 2012, the project's files have been downloaded 595,000 times from the SF.net portal.[85] This figure, though, is disputable because of the January 2011 attacks on SourceForge.net.[lower-alpha 4] More relevant are then the average periodic data, reaching about 1600 weekly downloads − or 230 per day − in the first months of 2012. As of May 2012, the project has received an average user rating of 88% out of 95 reviews on SourceForge.net portal. On the Linux gaming portal Penguspy, at the same date, Speed Dreams had received a mark of 9.49/10 out of 65 votes, which earned the project the first place within the "Racing" category, and the 18th place overall (8th considering only the open source games). On Desura, in the same period, the project's score was of 6/10 out of 90 reviews; the discrepancy can be interpreted as a result of the coexistence − on this platform − of both open source and proprietary video games.
See also
- TORCS, the parent project of Speed Dreams
- RARS, the parent project of TORCS
- VDrift, another open source racing simulation
- Sim racing
- List of open-source video games
Notes
- Considering that:
- Speed Dreams was forked from TORCS, which in turn was based on RARS,
- arcade racing is a different genre from sim racing (see also Sim racing),
- A "Pseudo-3D" engine projects the car's physics on a plane:
- Cars have a limited banking/pitch angle
- Physics are more precise for low values of banking and pitch
- The 10,000th message was, for a peculiar circumstance, an announcement related to this Wikipedia article; it can be found here.
- On 25 and 26 January 2011, download figures reached respectively 17,340 and 11,366: up to 20 times the number of average daily downloads of the previous week, without any new file release from the project.[86]
References
- "Browse 2.2.2". November 4, 2018. Retrieved October 17, 2019.
- "Speed Dreams official website - About Speed Dreams".
- Meuret, Jean-Philippe (2008–2012). "Speed Dreams: an Open Motorsport Sim". Retrieved 18 April 2012.
- Meuret, Jean-Philippe; Kelder, Mart; Mattea, Enrico (12 February 2011 – 3 May 2012). "Speed Dreams Wiki - Racing modes". Retrieved 3 May 2012.
- Meuret, Jean-Philippe; Kmetyko, Gábor (3 January 2011 – 22 January 2012). "Speed Dreams Trac system ticket #308 "Run a race with no graphics"". Retrieved 3 May 2012.
- "3D Engine for Driving Simulation". 23 November 2009. Retrieved 23 January 2012.
- Meuret, Jean-Philippe; Kály-Kullai, Kristóf; Kmetyko, Gábor. "Speed Dreams Trac system ticket #150 "Simu V2.1"". Retrieved 24 December 2011.
- Mungewell, Simon (27 December 2011). "Speed Dreams Wiki - SD 2.0 Manual - Options". Retrieved 1 February 2012.
- Meuret, Jean-Philippe (4 August 2011). "Location Information". speed-dreams-users (Mailing list). Retrieved 1 February 2012.
- Dimitrakakis, Christos. "Simu V3". Archived from the original on June 30, 2008. Retrieved 23 January 2012.CS1 maint: unfit URL (link)
- "Speed Dreams Jabber IRC meetings log - 30 May 2010". 30 May 2010.
- Meuret, Jean-Philippe. "Speed Dreams Wiki - summary of 30 May 2010 IRC meeting". Retrieved 31 December 2011.
- Wood, Simon. "Speed Dreams 2.1 - Green, Green, GREEN". Retrieved 10 February 2015.
- Sommer, Torsten (1 March 2008). "2.3.2 TORCS". Physics for a 3D Driving Simulator (PDF) (Bachelor thesis). Advisors: Thomas Bräunl, Philipp Harms. Technische Universität München. p. 23. Retrieved 1 February 2012.
- Wymann, Bernhard. "TORCS Robot Tutorial - 8.1 Introduction into pit stops". Retrieved 28 April 2012.
- Jäger, Eckhard M. (7 November 2011). "Twitter - @speed_dreams". Retrieved 27 April 2012.
- Kmetyko, Gábor; Mungewell, Simon (26 January 2012). "Speed Dreams Trac system ticket #589 "New rear mirror"". Retrieved 27 April 2012.
- www.nontipago.it (2007). "TORCS - Guida rapida di riferimento" (PDF) (in Italian). p. 6. Retrieved 27 April 2012.
0 seleziona la modalità di visualizzazione arcade (utile nelle fasi iniziali)
- Kmetyko, Gábor (28 December 2009). "Speed Dreams Wiki - Robots - Main". Retrieved 26 January 2012.
- Curtis, Keith. "TORCS robot driving - How to drive a torcs car with a robot". Retrieved 26 January 2012.
- Say, Haruna; Bertaux, Xavier; Kelder, Mart (6 October 2009). "Speed Dreams Jabber IRC meetings log - 6 October 2009". Retrieved 9 May 2012.
The human driver is just another robot
- Kmetyko, Gábor; Say, Haruna (28 December 2009 – 5 January 2011). "Speed Dreams Wiki - List of Robots". Retrieved 9 May 2012.
- Say, Haruna; Beelitz, Wolf-Dieter; Kmetyko, Gábor. "Speed Dreams Wiki - List of AI names". Retrieved 31 December 2011.
- Wymann, Bernhard. "TORCS Robot Tutorial - 2.1 Basic Getting Unstuck". Retrieved 27 January 2012.
- Beelitz, Wolf-Dieter (19 April 2009). "Difficulty levels, assists, etc. propositions". torcs-ng-devel (Mailing list). Retrieved 27 January 2012.
- Meuret, Jean-Philippe (21 April 2009). "Simple robot and human driver skilling". torcs-ng-devel (Mailing list). Retrieved 27 January 2012.
- Meuret, Jean-Philippe (19 December 2009). "User / robots skilling". speed-dreams-devel (Mailing list). Retrieved 27 January 2012.
- Wymann, Bernhard. "TORCS Robot Tutorial - 8.5 Pit strategy functions". Retrieved 28 April 2012.
- Kmetyko, Gábor; Kelder, Mart; Bertaux, Xavier (4 November 2009). "Speed Dreams Jabber IRC meetings log - 4 November 2009".
The human robot function calls the pit menu there
- Kmetyko, Gábor; Kelder, Mart; Bertaux, Xavier (4 November 2009). "Speed Dreams Jabber IRC meetings log - 4 November 2009".
- florian.schueller, Simon (27–28 December 2012). "Speed Dreams Wiki - SD 2.0 Manual - In-game". Retrieved 21 June 2020.
- Ferramosca, Roberto (26 April 2012). "Speed Dreams 2.0 rilasciato, ecco come installarlo su Ubuntu" (in Italian). Retrieved 27 April 2012.
- Espié, Eric (2003-11-23). "Races rules added". torcs-devel (Mailing list). Retrieved 22 December 2011.
- Meuret, Jean-Philippe (3 June 2011). "Speed Dreams SVN repository logs - Revision 3657". Retrieved 9 May 2012.
- Meuret, Jean-Philippe; Mungewell, Simon (11 March 2011 – 18 March 2012). "Speed Dreams SVN - racerunningmenus.cpp". Retrieved 9 May 2012.
Accelerate time means reduce the simulation time step
- Dike, Neha (31 October 2008). "2.1 "Existing Open Source Simulators"". Physics Simulation for an Automotive Simulator (PDF) (Project Thesis for requirement of the award of Master of Engineering in Information and Communication Technology). University of Western Australia. p. 11. Retrieved 7 May 2012.
- Meuret, Jean-Philippe; Say, Haruna (20 July 2010 – 21 August 2011). "Speed Dreams Trac system ticket #138 "Task D29 : Car preview and selectable livery"". Retrieved 28 April 2012.
- Meuret, Jean-Philippe (17 October 2010 – 21 August 2011). "Speed Dreams Wiki - Custom car liveries". Retrieved 28 April 2012.
- Vives Piqueres, Jaime (20 June 2011). "Preview images (ls1-zentek-z7r)". speed-dreams-devel (Mailing list). Retrieved 23 January 2012.
- Vives Piqueres, Jaime (2 July 2011). "SD showroom/garage track". speed-dreams-devel (Mailing list). Retrieved 23 January 2012.
- Meuret, Jean-Philippe; Bertaux, Xavier (20 December 2009 – 3 August 2010). "Speed Dreams Wiki - Naming rules". Retrieved 30 April 2012.
- Martí Centelles, Vicente (2008). "Torcs Car Setup Editor v0.11". Retrieved 30 April 2012.
- Espié, Eric; Guionneau, Christophe. "TORCS manual - track definition". Archived from the original on February 23, 2002. Retrieved 21 January 2012.CS1 maint: unfit URL (link)
- Wymann, Bernhard. "TORCS Robot Tutorial - 1.3 Make the Robot Drive". Retrieved 21 January 2012.
- Kmetyko, Gábor (28 February 2012). "Borders, sides, barriers". Retrieved 3 March 2012.
- Sumner, Andrew; Meuret, Jean-Philippe (26 October 2011). "Speed Dreams Trac system - ticket #479 "Variable width track segments"". Retrieved 27 January 2012.
- Kmetyko, Gábor; Say, Haruna; Bertaux, Xavier; Meuret, Jean-Philippe; Mattea, Enrico (19 February 2011). "Speed Dreams Wiki - The people behind". Retrieved 18 April 2012.
- "Speed Dreams SVN repository logs - Revision 1". 14 September 2008. Retrieved 17 February 2012.
- Meuret, Jean-Philippe (30 October 2008). "simuv2 version". torcs-ng-devel (Mailing list). Retrieved 8 March 2012.
- Say, Haruna (5 August 2009). "Breaking away from TORCS?". torcs-ng-devel (Mailing list). Retrieved 17 February 2012.
- Kelder, Mart; Bertaux, Xavier; Gavin, Brian; Beelitz, Wolf-Dieter; Meuret, Jean-Philippe (8 August 2009). "Torcs-ng-dev Jabber chat room log - 8 August 2009". Retrieved 17 February 2012.
- Meuret, Jean-Philippe (5 September 2009). "Cleanup trunk from non delivered cars and robots". torcs-ng-devel (Mailing list). Retrieved 17 February 2012.
- Meuret, Jean-Philippe (27 March 2010). "Final 1.4.0 available on SF.net". speed-dreams-devel (Mailing list). Retrieved 17 February 2012.
- Lindner, Mirko (18 April 2010). "Speed Dreams 1.4.0 freigegeben" (in German). Retrieved 17 February 2012.
- Meuret, Jean-Philippe (14 April 2010). "Advertising time for 1.4.0". speed-dreams-devel (Mailing list). Retrieved 6 May 2012.
- "Speed Dreams Trac system - Roadmap". Archived from the original on 26 June 2010. Retrieved 6 May 2012.
- Meuret, Jean-Philippe (15 January 2012). "2.0.0 RC1". speed-dreams-devel (Mailing list). Retrieved 6 May 2012.
- Meuret, Jean-Philippe (7 April 2012). "WIP final packaging work for 2.0.0". speed-dreams-devel (Mailing list). Retrieved 6 May 2012.
- Nitesh (29 April 2012). "Speed Dreams 2.0 Released with New Cars, Career Mode and More". Ubuntu Vibes. Retrieved 6 May 2012.
- Jäger, Eckhard M. (25 April 2012). "Twitter - @speed_dreams". Retrieved 6 May 2012.
- Mungewell, Simon; Kmetyko, Gábor; Heni, Sebastian; Mattea, Enrico (25 April – 2 May 2012). "Did we announce SD 2.0 now?". speed-dreams-devel (Mailing list). Retrieved 6 May 2012.
- "Speed Dreams: an Open Motorsport Sim - Browse /2.0.0". SourceForge.net. 8–9 April 2012. Retrieved 7 May 2012.
- "PlayDeb.net - information for Speed Dreams". Retrieved 7 May 2012.
- Coelho, Filipe (22 April 2012). "Speed Dreams PPA: "Speed Dreams" team". Retrieved 7 May 2012.
- "Forziere di Morg4n". 26–29 April 2010. Retrieved 13 March 2012.
- Haase, Sven-Hendrik (27–28 April 2012). "Arch Linux - speed-dreams 2.0.0-1". Retrieved 5 May 2012.
- Bertaux, Xavier (9 April 2012). "speed-dreams-2.0.0-1.mga2 RPM for i586". Retrieved 5 May 2012.
- Stewart, Rob (3 September 2010). "Installing Speed Dreams in Fedora". Retrieved 5 May 2012.
- Gansser, Martin. "Building Speed Dreams 2.0 binaries for Fedora 16/17/18". Retrieved 23 June 2012.
- powtrix. "SlackBuilds.org - Speed Dreams". Retrieved 8 May 2012.
- "Index of /pub/frugalware/frugalware-1.6/source/games-extra/speed-dreams". 4 August 2010. Retrieved 7 May 2012.
- Tupone, Alfredo (16 March 2012). "Index of /games-sports/speed-dreams". Retrieved 6 May 2012.
- "Repository state of speed-dreams". 5 May 2012. Retrieved 8 May 2012.
- Haase, Sven-Hendrik (27 April 2011). "lglive git - games/speed-dreams/info". Retrieved 13 March 2012.
- de Oliveira, Michael Vinícius (7 August 2010). "PLIB libraries & examples". Retrieved 13 March 2012.
- de Oliveira, Michael Vinícius (25 April 2011). "Speed Dreams". Archived from the original on 8 July 2012. Retrieved 13 March 2012.
- Jung, Tim (18 March 2012). "Speed Dreams released on Desura". Retrieved 5 May 2012.
- Mungewell, Simon. "Speed Dreams".
- jaladaGmbH (3 August 2011). "Twitter - @jaladaGmbH". Retrieved 13 April 2012.
Start your engine and immerse yourself with care racing game "jalada Ultimate Racing".
- "JeuxLibres.net - classement - les plus populaires". 2010. Archived from the original on 4 April 2010. Retrieved 16 April 2012.
- Schmitz, Reinhard (7 November 2011). "Springer, Schwinger und Strategen". c't (in German) (24): 133. ISSN 0724-8679.
Allerdings haben die Speed-Dreams-Entwickler besonderes Augenmerk auf die Fahrphysik und auf die Rennbalance gelegt.
- Kmetyko, Gábor (11 November 2011). "SD for c't computer magazine". speed-dreams-devel (Mailing list). Retrieved 11 February 2012.
- "Premios PortalProgramas 2010 al software libre". 2010. Archived from the original on 3 January 2011. Retrieved 4 February 2012.
- "Speed Dreams nominado a los Premios PortalProgramas 2010 como Mejor juego libre". 2010. Archived from the original on 3 January 2011. Retrieved 4 February 2012.
- "Download Statistics: All Files". 29 March 2008 – 3 May 2012. Retrieved 3 May 2012.
- "Download Statistics: All Files". 22–29 January 2011. Retrieved 3 March 2012.
Further reading
- The Speed Dreams team (2009–2016). "Speed Dreams Wiki".
- Tanitimi, Oyun (June 2011). "Speed Dreams" (PDF). GNU Pardus-Linux.org e-magazine (in Turkish). www.pardus-linux.org (32): 32–40. Retrieved 8 May 2012.
- Schmitz, Reinhard (7 November 2011). "Springer, Schwinger und Strategen". c't (in German) (24): 133. ISSN 0724-8679.
- Schürmann, Tim (28 April 2012). "The game of the weekend: Speed Dreams 2.0" (in German). Retrieved 8 May 2012.
External links
| Wikimedia Commons has media related to Speed Dreams. |
- General
- Speed Dreams official website
- Speed Dreams : an Open Motorsport Sim project page on SourceForge.net
- Speed Dreams on the Linux Game Tome
- Speed Dreams on PenguSpy
- Speed Dreams on JeuxLibres.net
- Official communication channels
- Speed Dreams on Twitter
- Speed Dreams on Google+
- Speed Dreams on Facebook
- Speed Dreams community forums index page
- Speed Dreams mailing lists
- Speed Dreams forums on SourceForge.net
- Distribution and packaging
- Speed-Dreams PPA: "Speed Dreams" team on Launchpad
- Speed Dreams on PlayDeb.net
- Speed Dreams on Desura
- Speed Dreams on haikuware.com