Spherical pendulum
In physics, a spherical pendulum is a higher dimensional analogue of the pendulum. It consists of a mass m moving without friction on the surface of a sphere. The only forces acting on the mass are the reaction from the sphere and gravity.
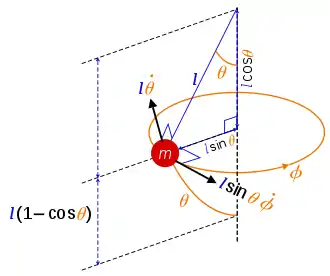
Owing to the spherical geometry of the problem, spherical coordinates are used to describe the position of the mass in terms of (r, θ, φ), where r is fixed, r=l.
Lagrangian mechanics
Routinely, in order to write down the kinetic and potential parts of the Lagrangian in arbitrary generalized coordinates the position of the mass is expressed along Cartesian axes. Here, following the conventions shown in the diagram,



- .



Next, time derivatives of these coordinates are taken, to obtain velocities along the axes
- .



Thus,

and


The Lagrangian, with constant parts removed, is[1]

The Euler–Lagrange equation involving the polar angle


gives

and

When the equation reduces to the differential equation for the motion of a simple gravity pendulum.

Similarly, the Euler–Lagrange equation involving the azimuth ,


gives
- .

The last equation shows that angular momentum around the vertical axis, is conserved. The factor will play a role in the Hamiltonian formulation below.


The second order differential equation determining the evolution of is thus
- .

The azimuth , being absent from the Lagrangian, is a cyclic coordinate, which implies that its conjugate momentum is a constant of motion.
The conical pendulum refers to the special solutions where and is a constant not depending on time.


Hamiltonian mechanics
The Hamiltonian is

where conjugate momenta are

and
- .

In terms of coordinates and momenta it reads

Hamilton's equations will give time evolution of coordinates and momenta in four first-order differential equations




Momentum is a constant of motion. That is a consequence of the rotational symmetry of the system around the vertical axis.

Trajectory
Trajectory of the mass on the sphere can be obtained from the expression for the total energy

by noting that the vertical component of angular momentum is a constant of motion, independent of time.[1]

Hence


which leads to an elliptic integral of the first kind[1] for

and an elliptic integral of the third kind for
- .

The angle lies between two circles of latitude,[1] where
- .

See also
References
- Landau, Lev Davidovich; Evgenii Mikhailovich Lifshitz (1976). Course of Theoretical Physics: Volume 1 Mechanics. Butterworth-Heinenann. pp. 33–34. ISBN 0750628960.
Further reading
- Weinstein, Alexander (1942). "The spherical pendulum and complex integration". The American Mathematical Monthly. 49 (8): 521–523. doi:10.1080/00029890.1942.11991275.
- Kohn, Walter (1946). "Countour integration in the theory of the spherical pendulum and the heavy symmetrical top". Transactions of the American Mathematical Society. 59 (1): 107–131. doi:10.2307/1990314. JSTOR 1990314.
- Olsson, M. G. (1981). "Spherical pendulum revisited". American Journal of Physics. 49 (6): 531–534. Bibcode:1981AmJPh..49..531O. doi:10.1119/1.12666.
- Horozov, Emil (1993). "On the isoenergetical non-degeneracy of the spherical pendulum". Physics Letters A. 173 (3): 279–283. Bibcode:1993PhLA..173..279H. doi:10.1016/0375-9601(93)90279-9.
- Shiriaev, A. S.; Ludvigsen, H.; Egeland, O. (2004). "Swinging up the spherical pendulum via stabilizatio of its first integrals". Automatica. 40: 73–85. doi:10.1016/j.automatica.2003.07.009.
- Essen, Hanno; Apazidis, Nicholas (2009). "Turning points of the spherical pendulum and the golden ration". European Journal of Physics. 30 (2): 427–432. Bibcode:2009EJPh...30..427E. doi:10.1088/0143-0807/30/2/021.
- Dullin, Holger R. (2013). "Semi-global symplectic invariants of the spherical pendulum". Journal of Differential Equations. 254 (7): 2942–2963. doi:10.1016/j.jde.2013.01.018.
