Antiparallelogram
In geometry, an antiparallelogram is a type of self-crossing quadrilateral. Like a parallelogram, an antiparallelogram has two opposite pairs of equal-length sides, but the sides in the longer pair cross each other as in a scissors mechanism. Antiparallelograms are also called contraparallelograms[1] or crossed parallelograms.[2]
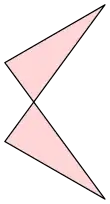
An antiparallelogram is a special case of a crossed quadrilateral, which has generally unequal edges.[3] A special form of the antiparallelogram is a crossed rectangle, in which two opposite edges are parallel.
Properties
Every antiparallelogram has an axis of symmetry through its crossing point. Because of this symmetry, it has two pairs of equal angles as well as two pairs of equal sides.[2] Together with the kites and the isosceles trapezoids, antiparallelograms form one of three basic classes of quadrilaterals with a symmetry axis. The convex hull of an antiparallelogram is an isosceles trapezoid, and every antiparallelogram may be formed from the non-parallel sides and diagonals of an isosceles trapezoid. As a special case, an antiparallelogram may also be formed from the diagonals and either pair of sides of a rectangle.[4]
Every antiparallelogram is a cyclic quadrilateral, meaning that its four vertices all lie on a single circle.
In polyhedra
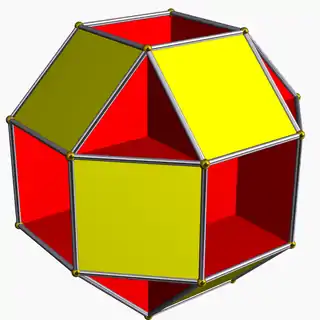
Several nonconvex uniform polyhedra, including the tetrahemihexahedron, cubohemioctahedron, octahemioctahedron, small rhombihexahedron, small icosihemidodecahedron, and small dodecahemidodecahedron, have antiparallelograms as their vertex figures, the cross-sections formed by slicing the polyhedron by a plane that passes near a vertex, perpendicularly to the axis between the vertex and the center.[5]
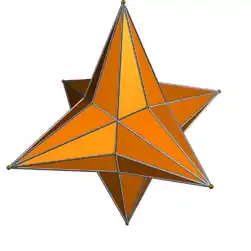
For uniform polyhedra of this type in which the faces do not pass through the center point of the polyhedron, the dual polyhedron has antiparallelograms as its faces; examples of dual uniform polyhedra with antiparallelogram faces include the small rhombihexacron, the great rhombihexacron, the small rhombidodecacron, the great rhombidodecacron, the small dodecicosacron, and the great dodecicosacron. The antiparallelograms that form the faces of these dual uniform polyhedra are the same antiparallelograms that form the vertex figure of the original uniform polyhedron.
One form of a non-uniform but flexible polyhedron, the Bricard octahedron, can be constructed as a double pyramid over an antiparallelogram.[6]
Four-bar linkages
The antiparallelogram has been used as a form of four-bar linkage, in which four rigid beams of fixed length (the four sides of the antiparallelogram) may rotate with respect to each other at joints placed at the four vertices of the antiparallelogram. In this context it is also called a butterfly or bow-tie linkage. As a linkage, it has a point of instability in which it can be converted into a parallelogram and vice versa.
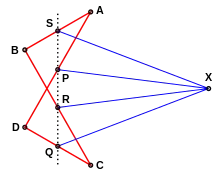
If one of the short (uncrossed) edges of an antiparallelogram linkage is fixed in place, and the remaining linkage moves freely, then the crossing point of the antiparallelogram traces out an ellipse that has the fixed edge's endpoints as its foci. The other moving short edge of the antiparallelogram has as its endpoints the foci of another moving ellipse, formed from the first one by reflection across a tangent line through the crossing point.[2][7]
For both the parallelogram and antiparallelogram linkages, if one of the long (crossed) edges of the linkage is fixed as a base, the free joints move on equal circles, but in a parallelogram they move in the same direction with equal velocities while in the antiparallelogram they move in opposite directions with unequal velocities.[8] As James Watt discovered, if an antiparallelogram has its long side fixed in this way it forms a variant of Watt's linkage, and the midpoint of the unfixed long edge will trace out a lemniscate or figure eight curve. For the antiparallelogram formed by the sides and diagonals of a square, it is the lemniscate of Bernoulli.[9]
The antiparallelogram is an important feature in the design of Hart's inversor, a linkage that (like the Peaucellier–Lipkin linkage) can convert rotary motion to straight-line motion.[10] An antiparallelogram-shaped linkage can also be used to connect the two axles of a four-wheeled vehicle, decreasing the turning radius of the vehicle relative to a suspension that only allows one axle to turn.[2] A pair of nested antiparallelograms was used in a linkage defined by Alfred Kempe as part of his universality theorem stating that any algebraic curve may be traced out by the joints of a suitably defined linkage. Kempe called the nested-antiparallelogram linkage a "multiplicator", as it could be used to multiply an angle by an integer.[1]
Without bracing an antiparallelogram linkage can be turned into a normal parallelogram. It can be braced to stop this happening using a construction by Abbott and Barton 2004. This construction can be used to fix a problem in Kempe's Universality Theorem.[11]
Celestial mechanics
In the n-body problem, the study of the motions of point masses under Newton's law of universal gravitation, an important role is played by central configurations, solutions to the n-body problem in which all of the bodies rotate around some central point as if they were rigidly connected to each other. For instance, for three bodies, there are five solutions of this type, given by the five Lagrangian points. For four bodies, with two pairs of the bodies having equal masses (but with the ratio between the masses of the two pairs varying continuously), numerical evidence indicates that there exists a continuous family of central configurations, related to each other by the motion of an antiparallelogram linkage.[12]
References
| Wikimedia Commons has media related to Antiparallelograms. |
- Demaine, Erik; O'Rourke, Joseph (2007), Geometric Folding Algorithms, Cambridge University Press, pp. 32–33, ISBN 978-0-521-71522-5.
- Bryant, John; Sangwin, Christopher J. (2008), "3.3 The Crossed Parallelogram", How round is your circle? Where Engineering and Mathematics Meet, Princeton University Press, pp. 54–56, ISBN 978-0-691-13118-4.
- Quadrilaterals
- Whitney, William Dwight; Smith, Benjamin Eli (1911), The Century Dictionary and Cyclopedia, The Century co., p. 1547.
- Coxeter, H. S. M.; Longuet-Higgins, M. S.; Miller, J. C. P. (1954), "Uniform polyhedra", Philosophical Transactions of the Royal Society of London. Series A. Mathematical and Physical Sciences, 246: 401–450, Bibcode:1954RSPTA.246..401C, doi:10.1098/rsta.1954.0003, JSTOR 91532, MR 0062446.
- Demaine, Erik D.; O'Rourke, Joseph (2007), "23.2 Flexible polyhedra", Geometric Folding Algorithms: Linkages, origami, polyhedra, Cambridge University Press, Cambridge, pp. 345–348, doi:10.1017/CBO9780511735172, ISBN 978-0-521-85757-4, MR 2354878.
- van Schooten, Frans (1646), De Organica Conicarum Sectionum In Plano Descriptione, Tractatus. Geometris, Opticis; Præsertim verò Gnomonicis et Mechanicis Utilis. Cui subnexa est Appendix, de Cubicarum Æquationum resolutione (in Latin), pp. 49–50, 69–70.
- Norton, Robert L. (2003), Design of Machinery, McGraw-Hill Professional, p. 51, ISBN 978-0-07-121496-4.
- Bryant & Sangwin (2008), pp. 58–59.
- Dijksman, E. A. (1976), Motion Geometry of Mechanisms, Cambridge University Press, p. 203, ISBN 9780521208413.
- Barton, Timothy Good (2008), Generalization of Kempe's Universality Theorem. (PDF)
- Grebenikov, Evgenii A.; Ikhsanov, Ersain V.; Prokopenya, Alexander N. (2006), "Numeric-symbolic computations in the study of central configurations in the planar Newtonian four-body problem", Computer algebra in scientific computing, Lecture Notes in Comput. Sci., 4194, Berlin: Springer, pp. 192–204, doi:10.1007/11870814_16, MR 2279793.