Mobile manipulator
A mobile manipulator is a robot system built from a robotic manipulator arm mounted on a mobile platform. Such systems combine the advantages of mobile platforms and robotic manipulator arms and reduce their drawbacks. For instance, the mobile platform extends the workspace of the arm, whereas an arm offers several operational functionalities.
Description
A mobile manipulation system offers a dual advantage of mobility offered by a mobile platform and dexterity offered by the manipulator. The mobile platform offers unlimited workspace to the manipulator. The extra degrees of freedom of the mobile platform also provide user with more choices. However, the operation of such a system is challenging because of the many degrees of freedom and the unstructured environment that it performs in.
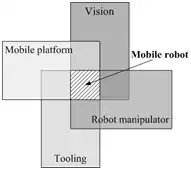
General system composition:
- Mobile platform
- Robot manipulator
- Vision
- Tooling
Motivation
At the moment mobile manipulation is a subject of major focus in development and research environments, and mobile manipulators, either autonomous or teleoperated, are used in many areas, e.g. space exploration, military operations, home-care and health-care. However, within the industrial field the implementation of mobile manipulators has been limited, although the needs for intelligent and flexible automation are present. In addition, the necessary technology entities (mobile platforms, robot manipulators, vision and tooling) are, to a large extent, available off-the-shelf components.[1]
A reason for this is that the manufacturing industries act traditionally and, therefore, have reluctance in taking risks by implementing new technologies. Also, within the field of industrial mobile manipulation the centre of attention has been on optimization of the individual technologies, especially robot manipulators [2] and tooling,[3] while the integration, use and application have been neglected. This means that few implementations of mobile robots, in production environments, have been reported – e.g.[4] and.[5]
Timeline

| Year | Robot name | Company / Research Institute |
|---|---|---|
| 1996 | Hilare 2bis | LAAS-CNRS, France |
| 2000 | Jaume | Robotic Intelligence Lab, Jaume I University, Spain |
| 2004 | FAuStO | University of Verona, Italy |
| 2006 | MM-500 | Neobotix GmbH, Germany |
| 2009 | Little Helper | Department of Production, Aalborg University, Denmark |
| 2012 | G-WAM | Robotnik Automation & Barrett Technologies, Spain |
| 2013 | UBR-1 | Unbounded Robotics, United States |
| 2013 | X-WAM | Robotnik Automation & Barrett Technologies, Spain |
| 2015 | CARLoS | AIMEN, Spain |
| 2015 | RB-1 | Robotnik Automation & Kinova Robotics, Spain |
| 2018 | MuR 205 | Insitute of Assembly Technology, Leibniz University Hanover, Germany |
State of the art

One recent example is the mobile manipulator "Little Helper" from the Department of Production at Aalborg University.[6]
Notes and references
- M. Hvilshøj, S. Bøgh, O. Madsen and M. Kristiansen: The Mobile Robot “Little Helper”: Concepts, ideas and working principles, 14th IEEE International Conference on Emerging Technologies and Factory Automation, 2009
- A. Albu-Schäffer, S. Haddadin, C. Ott, A. Stemmer, T. Wimböck and G. Hirzinger: The DLR lightweight robot: design and control concepts for robots in human environments, Industrial Robot, vol. 34, no. 5, pp. 376–385, 2007
- H. Liu, P. Meusel, G. Hirzinger, M. Jin and Y. X. Liu: The Modular Multisensory DLR-HIT-Hand: Hardware and Software Architecture, IEEE/ASME Transactions on Mechatronics, vol. 13, no. 4, pp. 461–469, 2008
- A. Stopp, S. Horstmann, S. Kristensen and F. Lohnert: Towards Interactive Learning for Manufacturing Assistant, IEEE Transactions on Industrial Electronics, pp. 705–707, 2003
- E. Helms, R. D. Schraft and M. Hägele: rob@work: Robot assistant in industrial environments, Proceedings in IEEE International Workshop on Robot and Human Interactive Communication, pp. 399–404, 2002
- Research project; Industrial maturation and exploitation of mobile manipulators – more info: MachineVision.dk
External links
| Main articles |  | |
|---|---|---|
| Types | ||
| Classifications | ||
| Locomotion | ||
| Research | ||
| Related | ||
| ||