Vector calculus identities
The following are important identities involving derivatives and integrals in vector calculus.
| Part of a series of articles about |
| Calculus |
|---|
Operator notation
Gradient
For a function in three-dimensional Cartesian coordinate variables, the gradient is the vector field:


where i, j, k are the standard unit vectors for the x, y, z-axes. More generally, for a function of n variables , also called a scalar field, the gradient is the vector field:


where are orthogonal unit vectors in arbitrary directions.

For a vector field written as a 1 × n row vector, also called a tensor field of order 1, the gradient or covariant derivative is the n × n Jacobian matrix:


For a tensor field of any order k, the gradient is a tensor field of order k + 1.


Divergence
In Cartesian coordinates, the divergence of a continuously differentiable vector field is the scalar-valued function:


The divergence of a tensor field of non-zero order k is written as , a contraction to a tensor field of order k − 1. Specifically, the divergence of a vector is a scalar. The divergence of a higher order tensor field may be found by decomposing the tensor field into a sum of outer products and using the identity,


where is the directional derivative in the direction of multiplied by its magnitude. Specifically, for the outer product of two vectors,



Curl
In Cartesian coordinates, for the curl is the vector field:

where i, j, and k are the unit vectors for the x-, y-, and z-axes, respectively. In Einstein notation, the vector field has curl given by:


where = ±1 or 0 is the Levi-Civita parity symbol.

Laplacian
In Cartesian coordinates, the Laplacian of a function is

For a tensor field, , the Laplacian is generally written as:

and is a tensor field of the same order.
When the Laplacian is equal to 0, the function is called a Harmonic Function. That is,

Special notations
In Feynman subscript notation,

where the notation ∇B means the subscripted gradient operates on only the factor B.[1][2]
Less general but similar is the Hestenes overdot notation in geometric algebra.[3] The above identity is then expressed as:

where overdots define the scope of the vector derivative. The dotted vector, in this case B, is differentiated, while the (undotted) A is held constant.
For the remainder of this article, Feynman subscript notation will be used where appropriate.
First derivative identities
For scalar fields , and vector fields , , we have the following derivative identities.


Distributive properties

Product rule for multiplication by a scalar
We have the following generalizations of the product rule in single variable calculus.

In the second formula, the transposed gradient is an n × 1 column vector, is a 1 × n row vector, and their product is an n × n matrix (or more precisely, a dyad); This may also be considered as the tensor product of two vectors, or of a covector and a vector.


Quotient rule for division by a scalar

Chain rule
Let be a one-variable function from scalars to scalars, a parametrized curve, and a function from vectors to scalars. We have the following special cases of the multi-variable chain rule.




For a coordinate parametrization we have:


Here we take the trace of the product of two n × n matrices: the gradient of A and the Jacobian of .

Dot product rule

where denotes the Jacobian matrix of the vector field , and in the last expression the operations are understood not to act on the directions (which some authors would indicate by appropriate parentheses or transposes).




Alternatively, using Feynman subscript notation,

See these notes.[4]
As a special case, when A = B,

The generalization of the dot product formula to Riemannian manifolds is a defining property of a Riemannian connection, which differentiates a vector field to give a vector-valued 1-form.
Cross product rule

Note the difference between

and

Also note that the matrix is antisymmetric.

Second derivative identities
Divergence of curl is zero
The divergence of the curl of any vector field A is always zero:

This is a special case of the vanishing of the square of the exterior derivative in the De Rham chain complex.
Divergence of gradient is Laplacian
The Laplacian of a scalar field is the divergence of its gradient:

The result is a scalar quantity.
Divergence of divergence is undefined
Divergence of a vector field A is a scalar, and you cannot take the divergence of a scalar quantity. Therefore:

Curl of gradient is zero
The curl of the gradient of any continuously twice-differentiable scalar field is always the zero vector:


This is a special case of the vanishing of the square of the exterior derivative in the De Rham chain complex.

Curl of divergence is undefined
The divergence of a vector field A is a scalar, and you cannot take curl of a scalar quantity. Therefore

Summary of important identities
Gradient




Divergence



Curl




Vector dot Del Operator

Second derivatives
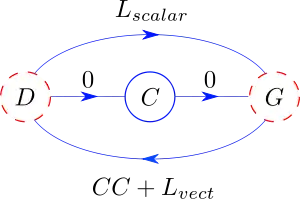








The figure to the right is a mnemonic for some of these identities. The abbreviations used are:
- D: divergence,
- C: curl,
- G: gradient,
- L: Laplacian,
- CC: curl of curl.
Each arrow is labeled with the result of an identity, specifically, the result of applying the operator at the arrow's tail to the operator at its head. The blue circle in the middle means curl of curl exists, whereas the other two red circles (dashed) mean that DD and GG do not exist.
Third derivatives

Integration
Below, the curly symbol ∂ means "boundary of" a surface or solid.
Surface–volume integrals
In the following surface–volume integral theorems, V denotes a three-dimensional volume with a corresponding two-dimensional boundary S = ∂V (a closed surface):












Curve–surface integrals
In the following curve–surface integral theorems, S denotes a 2d open surface with a corresponding 1d boundary C = ∂S (a closed curve):


Integration around a closed curve in the clockwise sense is the negative of the same line integral in the counterclockwise sense (analogous to interchanging the limits in a definite integral):





See also
References
- Feynman, R. P.; Leighton, R. B.; Sands, M. (1964). The Feynman Lectures on Physics. Addison-Wesley. Vol II, p. 27–4. ISBN 0-8053-9049-9.
- Kholmetskii, A. L.; Missevitch, O. V. (2005). "The Faraday induction law in relativity theory" (PDF). p. 4. arXiv:physics/0504223.
- Doran, C.; Lasenby, A. (2003). Geometric algebra for physicists. Cambridge University Press. p. 169. ISBN 978-0-521-71595-9.
- Kelly, P. (2013). "Chapter 1.14 Tensor Calculus 1: Tensor Fields" (PDF). Mechanics Lecture Notes Part III: Foundations of Continuum Mechanics. University of Auckland. Retrieved 7 December 2017.
Further reading
- Balanis, Constantine A. (23 May 1989). Advanced Engineering Electromagnetics. ISBN 0-471-62194-3.
- Schey, H. M. (1997). Div Grad Curl and all that: An informal text on vector calculus. W. W. Norton & Company. ISBN 0-393-96997-5.
- Griffiths, David J. (1999). Introduction to Electrodynamics. Prentice Hall. ISBN 0-13-805326-X.
