Simplex
In geometry, a simplex (plural: simplexes or simplices) is a generalization of the notion of a triangle or tetrahedron to arbitrary dimensions. The simplex is so-named because it represents the simplest possible polytope in any given space.

For example,
- a 0-simplex is a point,
- a 1-simplex is a line segment,
- a 2-simplex is a triangle,
- a 3-simplex is a tetrahedron,
- a 4-simplex is a 5-cell.
Specifically, a k-simplex is a k-dimensional polytope which is the convex hull of its k + 1 vertices. More formally, suppose the k + 1 points are affinely independent, which means are linearly independent. Then, the simplex determined by them is the set of points



A regular simplex[1] is a simplex that is also a regular polytope. A regular k-simplex may be constructed from a regular (k − 1)-simplex by connecting a new vertex to all original vertices by the common edge length.
The standard simplex or probability simplex [2] is the simplex whose vertices are the k standard unit vectors and the origin, or

In topology and combinatorics, it is common to “glue together” simplices to form a simplicial complex. The associated combinatorial structure is called an abstract simplicial complex, in which context the word “simplex” simply means any finite set of vertices.
History
The concept of a simplex was known to William Kingdon Clifford, who wrote about these shapes in 1886 but called them "prime confines". Henri Poincaré, writing about algebraic topology in 1900, called them "generalized tetrahedra". In 1902 Pieter Hendrik Schoute described the concept first with the Latin superlative simplicissimum ("simplest") and then with the same Latin adjective in the normal form simplex ("simple").[3]
The regular simplex family is the first of three regular polytope families, labeled by Donald Coxeter as αn, the other two being the cross-polytope family, labeled as βn, and the hypercubes, labeled as γn. A fourth family, the tessellation of n-dimensional space by infinitely many hypercubes, he labeled as δn.[4]
Elements
The convex hull of any nonempty subset of the n + 1 points that define an n-simplex is called a face of the simplex. Faces are simplices themselves. In particular, the convex hull of a subset of size m + 1 (of the n + 1 defining points) is an m-simplex, called an m-face of the n-simplex. The 0-faces (i.e., the defining points themselves as sets of size 1) are called the vertices (singular: vertex), the 1-faces are called the edges, the (n − 1)-faces are called the facets, and the sole n-face is the whole n-simplex itself. In general, the number of m-faces is equal to the binomial coefficient .[5] Consequently, the number of m-faces of an n-simplex may be found in column (m + 1) of row (n + 1) of Pascal's triangle. A simplex A is a coface of a simplex B if B is a face of A. Face and facet can have different meanings when describing types of simplices in a simplicial complex; see simplical complex for more detail.

The number of 1-faces (edges) of the n-simplex is the n-th triangle number, the number of 2-faces of the n-simplex is the (n − 1)th tetrahedron number, the number of 3-faces of the n-simplex is the (n − 2)th 5-cell number, and so on.
| Δn | Name | Schläfli Coxeter |
0- faces (vertices) |
1- faces (edges) |
2- faces |
3- faces |
4- faces |
5- faces |
6- faces |
7- faces |
8- faces |
9- faces |
10- faces |
Sum = 2n+1 − 1 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Δ0 | 0-simplex (point) |
( ) |
1 | 1 | ||||||||||
| Δ1 | 1-simplex (line segment) |
{ } = ( ) ∨ ( ) = 2 · ( ) |
2 | 1 | 3 | |||||||||
| Δ2 | 2-simplex (triangle) |
{3} = 3 · ( ) |
3 | 3 | 1 | 7 | ||||||||
| Δ3 | 3-simplex (tetrahedron) |
{3,3} = 4 · ( ) |
4 | 6 | 4 | 1 | 15 | |||||||
| Δ4 | 4-simplex (5-cell) |
{33} = 5 · ( ) |
5 | 10 | 10 | 5 | 1 | 31 | ||||||
| Δ5 | 5-simplex | {34} = 6 · ( ) |
6 | 15 | 20 | 15 | 6 | 1 | 63 | |||||
| Δ6 | 6-simplex | {35} = 7 · ( ) |
7 | 21 | 35 | 35 | 21 | 7 | 1 | 127 | ||||
| Δ7 | 7-simplex | {36} = 8 · ( ) |
8 | 28 | 56 | 70 | 56 | 28 | 8 | 1 | 255 | |||
| Δ8 | 8-simplex | {37} = 9 · ( ) |
9 | 36 | 84 | 126 | 126 | 84 | 36 | 9 | 1 | 511 | ||
| Δ9 | 9-simplex | {38} = 10 · ( ) |
10 | 45 | 120 | 210 | 252 | 210 | 120 | 45 | 10 | 1 | 1023 | |
| Δ10 | 10-simplex | {39} = 11 · ( ) |
11 | 55 | 165 | 330 | 462 | 462 | 330 | 165 | 55 | 11 | 1 | 2047 |
In layman's terms, an n-simplex is a simple shape (a polygon) that requires n dimensions. Consider a line segment AB as a "shape" in a 1-dimensional space (the 1-dimensional space is the line in which the segment lies). One can place a new point C somewhere off the line. The new shape, triangle ABC, requires two dimensions; it cannot fit in the original 1-dimensional space. The triangle is the 2-simplex, a simple shape that requires two dimensions. Consider a triangle ABC, a shape in a 2-dimensional space (the plane in which the triangle resides). One can place a new point D somewhere off the plane. The new shape, tetrahedron ABCD, requires three dimensions; it cannot fit in the original 2-dimensional space. The tetrahedron is the 3-simplex, a simple shape that requires three dimensions. Consider tetrahedron ABCD, a shape in a 3-dimensional space (the 3-space in which the tetrahedron lies). One can place a new point E somewhere outside the 3-space. The new shape ABCDE, called a 5-cell, requires four dimensions and is called the 4-simplex; it cannot fit in the original 3-dimensional space. (It also cannot be visualized easily.) This idea can be generalized, that is, adding a single new point outside the currently occupied space, which requires going to the next higher dimension to hold the new shape. This idea can also be worked backward: the line segment we started with is a simple shape that requires a 1-dimensional space to hold it; the line segment is the 1-simplex. The line segment itself was formed by starting with a single point in 0-dimensional space (this initial point is the 0-simplex) and adding a second point, which required the increase to 1-dimensional space.
More formally, an (n + 1)-simplex can be constructed as a join (∨ operator ) of an n-simplex and a point, ( ). An (m + n + 1)-simplex can be constructed as a join of an m-simplex and an n-simplex. The two simplices are oriented to be completely normal from each other, with translation in a direction orthogonal to both of them. A 1-simplex is the join of two points: ( ) ∨ ( ) = 2 · ( ). A general 2-simplex (scalene triangle) is the join of three points: ( ) ∨ ( ) ∨ ( ). An isosceles triangle is the join of a 1-simplex and a point: { } ∨ ( ). An equilateral triangle is 3 · ( ) or {3}. A general 3-simplex is the join of 4 points: ( ) ∨ ( ) ∨ ( ) ∨ ( ). A 3-simplex with mirror symmetry can be expressed as the join of an edge and two points: { } ∨ ( ) ∨ ( ). A 3-simplex with triangular symmetry can be expressed as the join of an equilateral triangle and 1 point: 3.( )∨( ) or {3}∨( ). A regular tetrahedron is 4 · ( ) or {3,3} and so on.
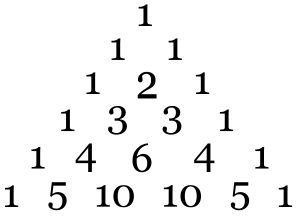 The numbers of faces in the above table are the same as in Pascal's triangle, without the left diagonal. |
In some conventions,[7] the empty set is defined to be a (−1)-simplex. The definition of the simplex above still makes sense if n = −1. This convention is more common in applications to algebraic topology (such as simplicial homology) than to the study of polytopes.
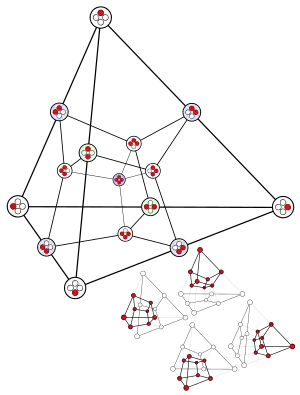
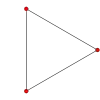
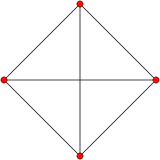
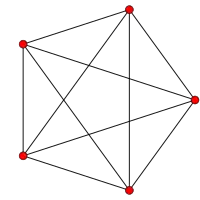
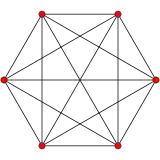
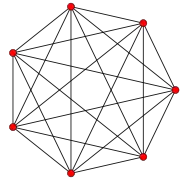
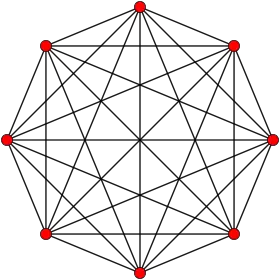
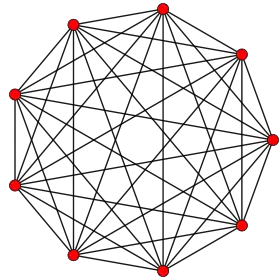
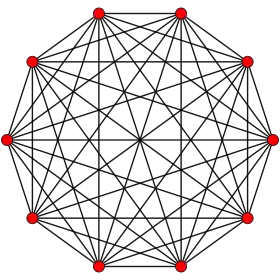
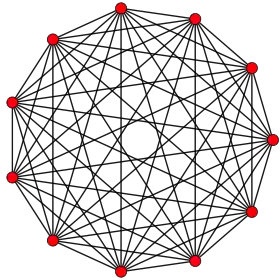
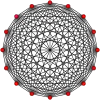
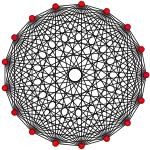
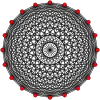
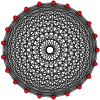
Symmetric graphs of regular simplices
These Petrie polygons (skew orthogonal projections) show all the vertices of the regular simplex on a circle, and all vertex pairs connected by edges.
 1 |
 2 |
 3 |
 4 |
 5 |
 6 |
 7 |
 8 |
 9 |
 10 |
 11 |
 12 |
 13 |
 14 |
 15 |
 16 |
 17 |
 18 |
 19 |
 20 |
The standard simplex
The standard n-simplex (or unit n-simplex) is the subset of Rn+1 given by

The simplex Δn lies in the affine hyperplane obtained by removing the restriction ti ≥ 0 in the above definition.
The n + 1 vertices of the standard n-simplex are the points ei ∈ Rn+1, where
- e0 = (1, 0, 0, ..., 0),
- e1 = (0, 1, 0, ..., 0),
- en = (0, 0, 0, ..., 1).

There is a canonical map from the standard n-simplex to an arbitrary n-simplex with vertices (v0, ..., vn) given by

The coefficients ti are called the barycentric coordinates of a point in the n-simplex. Such a general simplex is often called an affine n-simplex, to emphasize that the canonical map is an affine transformation. It is also sometimes called an oriented affine n-simplex to emphasize that the canonical map may be orientation preserving or reversing.
More generally, there is a canonical map from the standard -simplex (with n vertices) onto any polytope with n vertices, given by the same equation (modifying indexing):


These are known as generalized barycentric coordinates, and express every polytope as the image of a simplex:

A commonly used function from Rn to the interior of the standard -simplex is the softmax function, or normalized exponential function; this generalizes the standard logistic function.
Examples
- Δ0 is the point 1 in R1.
- Δ1 is the line segment joining (1, 0) and (0, 1) in R2.
- Δ2 is the equilateral triangle with vertices (1, 0, 0), (0, 1, 0) and (0, 0, 1) in R3.
- Δ3 is the regular tetrahedron with vertices (1, 0, 0, 0), (0, 1, 0, 0), (0, 0, 1, 0) and (0, 0, 0, 1) in R4.
Increasing coordinates
An alternative coordinate system is given by taking the indefinite sum:

This yields the alternative presentation by order, namely as nondecreasing n-tuples between 0 and 1:

Geometrically, this is an n-dimensional subset of (maximal dimension, codimension 0) rather than of (codimension 1). The facets, which on the standard simplex correspond to one coordinate vanishing, here correspond to successive coordinates being equal, while the interior corresponds to the inequalities becoming strict (increasing sequences).




A key distinction between these presentations is the behavior under permuting coordinates – the standard simplex is stabilized by permuting coordinates, while permuting elements of the "ordered simplex" do not leave it invariant, as permuting an ordered sequence generally makes it unordered. Indeed, the ordered simplex is a (closed) fundamental domain for the action of the symmetric group on the n-cube, meaning that the orbit of the ordered simplex under the n! elements of the symmetric group divides the n-cube into mostly disjoint simplices (disjoint except for boundaries), showing that this simplex has volume Alternatively, the volume can be computed by an iterated integral, whose successive integrands are



A further property of this presentation is that it uses the order but not addition, and thus can be defined in any dimension over any ordered set, and for example can be used to define an infinite-dimensional simplex without issues of convergence of sums.
Projection onto the standard simplex
Especially in numerical applications of probability theory a projection onto the standard simplex is of interest. Given with possibly negative entries, the closest point on the simplex has coordinates



where is chosen such that


can be easily calculated from sorting .[8] The sorting approach takes complexity, which can be improved to complexity via median-finding algorithms.[9] Projecting onto the simplex is computationally similar to projecting onto the ball.




Corner of cube
Finally, a simple variant is to replace "summing to 1" with "summing to at most 1"; this raises the dimension by 1, so to simplify notation, the indexing changes:

This yields an n-simplex as a corner of the n-cube, and is a standard orthogonal simplex. This is the simplex used in the simplex method, which is based at the origin, and locally models a vertex on a polytope with n facets.
Cartesian coordinates for a regular n-dimensional simplex in Rn
One way to write down a regular n-simplex in Rn is to choose two points to be the first two vertices, choose a third point to make an equilateral triangle, choose a fourth point to make a regular tetrahedron, and so on. Each step requires satisfying equations that ensure that each newly chosen vertex, together with the previously chosen vertices, forms a regular simplex. There are several sets of equations that can be written down and used for this purpose. These include the equality of all the distances between vertices; the equality of all the distances from vertices to the center of the simplex; the fact that the angle subtended through the new vertex by any two previously chosen vertices is ; and the fact that the angle subtended through the center of the simplex by any two vertices is .


It is also possible to directly write down a particular regular n-simplex in Rn which can then be translated, rotated, and scaled as desired. One way to do this is as follows. Denote the basis vectors of Rn by e1 through en. Begin with the standard (n − 1)-simplex which is the convex hull of the basis vectors. By adding an additional vertex, these become a face of a regular n-simplex. The additional vertex must lie on the line perpendicular to the barycenter of the standard simplex, so it has the form (α/n, ..., α/n) for some real number α. Since the squared distance between two basis vectors is 2, in order for the additional vertex to form a regular n-simplex, the squared distance between it and any of the basis vectors must also be 2. This yields a quadratic equation for α. Solving this equation shows that there are two choices for the additional vertex:

Either of these, together with the standard basis vectors, yields a regular n-simplex.
The above regular n-simplex is not centered on the origin. It can be translated to the origin by subtracting the mean of its vertices. By rescaling, it can be given unit side length. This results in the simplex whose vertices are:

for , and


This simplex is inscribed in a hypersphere of radius .

A different rescaling produces a simplex that is inscribed in a unit hypersphere. When this is done, its vertices are

where , and

The side length of this simplex is .

A highly symmetric way to construct a regular n-simplex is to use a representation of the cyclic group Zn+1 by orthogonal matrices. This is an n× n orthogonal matrix Q such that Qn+1 = I is the identity matrix, but no lower power of Q is. Applying powers of this matrix to an appropriate vector v will produce the vertices of a regular n-simplex. To carry this out, first observe that for any orthogonal matrix Q, there is a choice of basis in which Q is a block diagonal matrix

where each Qi is orthogonal and either 2 × 2 or 1 ÷ 1. In order for Q to have order n + 1, all of these matrices must have order dividing n + 1. Therefore each Qi is either a 1 × 1 matrix whose only entry is 1 or, if n is odd, −1; or it is a 2 × 2 matrix of the form

where each ωi is an integer between zero and n inclusive. A sufficient condition for the orbit of a point to be a regular simplex is that the matrices Qi form a basis for the non-trivial irreducible real representations of Zn+1, and the vector being rotated is not stabilized by any of them.
In practical terms, for n even this means that every matrix Qi is 2 × 2, there is an equality of sets

and, for every Qi, the entries of v upon which Qi acts are not both zero. For example, when n = 4, one possible matrix is

Applying this to the vector (1, 0, 1, 0) results in the simplex whose vertices are

each of which has distance √5 from the others. When n is odd, the condition means that exactly one of the diagonal blocks is 1 × 1, equal to −1, and acts upon a non-zero entry of v; while the remaining diagonal blocks, say Q1, ..., Q(n − 1) / 2, are 2 × 2, there is an equality of sets

and each diagonal block acts upon a pair of entries of v which are not both zero. So, for example, when n = 3, the matrix can be

For the vector (1, 0, 1/√2), the resulting simplex has vertices

each of which has distance 2 from the others.
Geometric properties
Volume
The volume of an n-simplex in n-dimensional space with vertices (v0, ..., vn) is

where each column of the n × n determinant is the difference between the vectors representing two vertices.[10] A more symmetric way to write it is

Another common way of computing the volume of the simplex is via the Cayley–Menger determinant. It can also compute the volume of a simplex embedded in a higher-dimensional space, e.g., a triangle in .[11]

Without the 1/n! it is the formula for the volume of an n-parallelotope. This can be understood as follows: Assume that P is an n-parallelotope constructed on a basis of . Given a permutation of , call a list of vertices a n-path if






(so there are n! n-paths and does not depend on the permutation). The following assertions hold:

If P is the unit n-hypercube, then the union of the n-simplexes formed by the convex hull of each n-path is P, and these simplexes are congruent and pairwise non-overlapping.[12] In particular, the volume of such a simplex is

If P is a general parallelotope, the same assertions hold except that it is no longer true, in dimension > 2, that the simplexes need to be pairwise congruent; yet their volumes remain equal, because the n-parallelotope is the image of the unit n-hypercube by the linear isomorphism that sends the canonical basis of to . As previously, this implies that the volume of a simplex coming from a n-path is:


Conversely, given an n-simplex of , it can be supposed that the vectors form a basis of . Considering the parallelotope constructed from and , one sees that the previous formula is valid for every simplex.



Finally, the formula at the beginning of this section is obtained by observing that

From this formula, it follows immediately that the volume under a standard n-simplex (i.e. between the origin and the simplex in Rn+1) is

The volume of a regular n-simplex with unit side length is

as can be seen by multiplying the previous formula by xn+1, to get the volume under the n-simplex as a function of its vertex distance x from the origin, differentiating with respect to x, at (where the n-simplex side length is 1), and normalizing by the length of the increment, , along the normal vector.



Dihedral angles of the regular n-simplex
Any two (n − 1)-dimensional faces of a regular n-dimensional simplex are themselves regular (n − 1)-dimensional simplices, and they have the same dihedral angle of cos−1(1/n).[13][14]
This can be seen by noting that the center of the standard simplex is , and the centers of its faces are coordinate permutations of . Then, by symmetry, the vector pointing from to is perpendicular to the faces. So the vectors normal to the faces are permutations of , from which the dihedral angles are calculated.



Simplices with an "orthogonal corner"
An "orthogonal corner" means here that there is a vertex at which all adjacent edges are pairwise orthogonal. It immediately follows that all adjacent faces are pairwise orthogonal. Such simplices are generalizations of right triangles and for them there exists an n-dimensional version of the Pythagorean theorem:
The sum of the squared (n − 1)-dimensional volumes of the facets adjacent to the orthogonal corner equals the squared (n − 1)-dimensional volume of the facet opposite of the orthogonal corner.

where are facets being pairwise orthogonal to each other but not orthogonal to , which is the facet opposite the orthogonal corner.


For a 2-simplex the theorem is the Pythagorean theorem for triangles with a right angle and for a 3-simplex it is de Gua's theorem for a tetrahedron with an orthogonal corner.
Relation to the (n + 1)-hypercube
The Hasse diagram of the face lattice of an n-simplex is isomorphic to the graph of the (n + 1)-hypercube's edges, with the hypercube's vertices mapping to each of the n-simplex's elements, including the entire simplex and the null polytope as the extreme points of the lattice (mapped to two opposite vertices on the hypercube). This fact may be used to efficiently enumerate the simplex's face lattice, since more general face lattice enumeration algorithms are more computationally expensive.
The n-simplex is also the vertex figure of the (n + 1)-hypercube. It is also the facet of the (n + 1)-orthoplex.
Topology
Topologically, an n-simplex is equivalent to an n-ball. Every n-simplex is an n-dimensional manifold with corners.
Probability
In probability theory, the points of the standard n-simplex in (n + 1)-space form the space of possible probability distributions on a finite set consisting of n + 1 possible outcomes. The correspondence is as follows: For each distribution described as an ordered (n + 1)-tuple of probabilities whose sum is (necessarily) 1, we associate the point of the simplex whose barycentric coordinates are precisely those probabilities. That is, the kth vertex of the simplex is assigned to have the kth probability of the (n + 1)-tuple as its barycentric coefficient. This correspondence is an affine homeomorphism.
Compounds
Since all simplices are self-dual, they can form a series of compounds;
- Two triangles form a hexagram {6/2}.
- Two tetrahedra form a compound of two tetrahedra or stella octangula.
- Two 5-cells form a compound of two 5-cells in four dimensions.
Algebraic topology
In algebraic topology, simplices are used as building blocks to construct an interesting class of topological spaces called simplicial complexes. These spaces are built from simplices glued together in a combinatorial fashion. Simplicial complexes are used to define a certain kind of homology called simplicial homology.
A finite set of k-simplexes embedded in an open subset of Rn is called an affine k-chain. The simplexes in a chain need not be unique; they may occur with multiplicity. Rather than using standard set notation to denote an affine chain, it is instead the standard practice to use plus signs to separate each member in the set. If some of the simplexes have the opposite orientation, these are prefixed by a minus sign. If some of the simplexes occur in the set more than once, these are prefixed with an integer count. Thus, an affine chain takes the symbolic form of a sum with integer coefficients.
Note that each facet of an n-simplex is an affine (n − 1)-simplex, and thus the boundary of an n-simplex is an affine (n − 1)-chain. Thus, if we denote one positively oriented affine simplex as

with the denoting the vertices, then the boundary of σ is the chain



It follows from this expression, and the linearity of the boundary operator, that the boundary of the boundary of a simplex is zero:

Likewise, the boundary of the boundary of a chain is zero: .

More generally, a simplex (and a chain) can be embedded into a manifold by means of smooth, differentiable map . In this case, both the summation convention for denoting the set, and the boundary operation commute with the embedding. That is,


where the are the integers denoting orientation and multiplicity. For the boundary operator , one has:



where ρ is a chain. The boundary operation commutes with the mapping because, in the end, the chain is defined as a set and little more, and the set operation always commutes with the map operation (by definition of a map).
A continuous map to a topological space X is frequently referred to as a singular n-simplex. (A map is generally called "singular" if it fails to have some desirable property such as continuity and, in this case, the term is meant to reflect to the fact that the continuous map need not be an embedding.)[15]

Algebraic geometry
Since classical algebraic geometry allows to talk about polynomial equations, but not inequalities, the algebraic standard n-simplex is commonly defined as the subset of affine (n + 1)-dimensional space, where all coordinates sum up to 1 (thus leaving out the inequality part). The algebraic description of this set is

which equals the scheme-theoretic description with


the ring of regular functions on the algebraic n-simplex (for any ring ).

By using the same definitions as for the classical n-simplex, the n-simplices for different dimensions n assemble into one simplicial object, while the rings assemble into one cosimplicial object (in the category of schemes resp. rings, since the face and degeneracy maps are all polynomial).


The algebraic n-simplices are used in higher K-theory and in the definition of higher Chow groups.
Applications
- In statistics, simplices are sample spaces of compositional data and are also used in plotting quantities that sum to 1, such as proportions of subpopulations, as in a ternary plot.
- In industrial statistics, simplices arise in problem formulation and in algorithmic solution. In the design of bread, the producer must combine yeast, flour, water, sugar, etc. In such mixtures, only the relative proportions of ingredients matters: For an optimal bread mixture, if the flour is doubled then the yeast should be doubled. Such mixture problem are often formulated with normalized constraints, so that the nonnegative components sum to one, in which case the feasible region forms a simplex. The quality of the bread mixtures can be estimated using response surface methodology, and then a local maximum can be computed using a nonlinear programming method, such as sequential quadratic programming.[16]
- In operations research, linear programming problems can be solved by the simplex algorithm of George Dantzig.
- In geometric design and computer graphics, many methods first perform simplicial triangulations of the domain and then fit interpolating polynomials to each simplex.[17]
- In chemistry, the hydrides of most elements in the p-block can resemble a simplex if one is to connect each atom. Neon does not react with hydrogen and as such is a point, fluorine bonds with one hydrogen atom and forms a line segment, oxygen bonds with two hydrogen atoms in a bent fashion resembling a triangle, nitrogen reacts to form a tetrahedron, and carbon forms a structure resembling a Schlegel diagram of the 5-cell. This trend continues for the heavier analogues of each element, as well as if the hydrogen atom is replaced by a halogen atom.
See also
- Aitchison geometry
- Complete graph
- Causal dynamical triangulation
- Distance geometry
- Delaunay triangulation
- Hill tetrahedron
- Other regular n-polytopes
- Hypersimplex
- Polytope
- Metcalfe's law
- List of regular polytopes
- Schläfli orthoscheme
- Simplex algorithm – a method for solving optimisation problems with inequalities.
- Simplicial complex
- Simplicial homology
- Simplicial set
- Ternary plot
- 3-sphere
Notes
- Elte, E.L. (2006) [1912]. "IV. five dimensional semiregular polytope". The Semiregular Polytopes of the Hyperspaces. Simon & Schuster. ISBN 978-1-4181-7968-7.
- Boyd & Vandenberghe 2004
- Miller, Jeff, "Simplex", Earliest Known Uses of Some of the Words of Mathematics, retrieved 2018-01-08
- Coxeter 1973, pp. 120-124, §7.2.
- Coxeter 1973, p. 120.
- Sloane, N. J. A. (ed.). "Sequence A135278 (Pascal's triangle with its left-hand edge removed)". The On-Line Encyclopedia of Integer Sequences. OEIS Foundation.
- Kozlov, Dimitry, Combinatorial Algebraic Topology, 2008, Springer-Verlag (Series: Algorithms and Computation in Mathematics)
- Yunmei Chen; Xiaojing Ye (2011). "Projection Onto A Simplex". arXiv:1101.6081 [math.OC].
- MacUlan, N.; De Paula, G. G. (1989). "A linear-time median-finding algorithm for projecting a vector on the simplex of n". Operations Research Letters. 8 (4): 219. doi:10.1016/0167-6377(89)90064-3.
- A derivation of a very similar formula can be found in Stein, P. (1966). "A Note on the Volume of a Simplex". American Mathematical Monthly. 73 (3): 299–301. doi:10.2307/2315353. JSTOR 2315353.
- Colins, Karen D. "Cayley-Menger Determinant". MathWorld.
- Every n-path corresponding to a permutation is the image of the n-path by the affine isometry that sends to , and whose linear part matches to for all i. hence every two n-paths are isometric, and so is their convex hulls; this explains the congruence of the simplexes. To show the other assertions, it suffices to remark that the interior of the simplex determined by the n-path is the set of points , with and Hence the components of these points with respect to each corresponding permuted basis are strictly ordered in the decreasing order. That explains why the simplexes are non-overlapping. The fact that the union of the simplexes is the whole unit n-hypercube follows as well, replacing the strict inequalities above by "". The same arguments are also valid for a general parallelotope, except the isometry between the simplexes.
- Parks, Harold R.; Wills, Dean C. (October 2002). "An Elementary Calculation of the Dihedral Angle of the Regular n-Simplex". American Mathematical Monthly. 109 (8): 756–8. doi:10.2307/3072403. JSTOR 3072403.
- Wills, Harold R.; Parks, Dean C. (June 2009). Connections between combinatorics of permutations and algorithms and geometry (PhD). Oregon State University. hdl:1957/11929.
- Lee, John M. (2006). Introduction to Topological Manifolds. Springer. pp. 292–3. ISBN 978-0-387-22727-6.
- Cornell, John (2002). Experiments with Mixtures: Designs, Models, and the Analysis of Mixture Data (third ed.). Wiley. ISBN 0-471-07916-2.
- Vondran, Gary L. (April 1998). "Radial and Pruned Tetrahedral Interpolation Techniques" (PDF). HP Technical Report. HPL-98-95: 1–32.










References
- Rudin, Walter (1976). Principles of Mathematical Analysis (3rd ed.). McGraw-Hill. ISBN 0-07-054235-X. (See chapter 10 for a simple review of topological properties.)
- Tanenbaum, Andrew S. (2003). "§2.5.3". Computer Networks (4th ed.). Prentice Hall. ISBN 0-13-066102-3.
- Devroye, Luc (1986). Non-Uniform Random Variate Generation. ISBN 0-387-96305-7. Archived from the original on 2009-05-05.
- Coxeter, H.S.M. (1973). Regular Polytopes (3rd ed.). Dover. ISBN 0-486-61480-8.
- pp. 120–121, §7.2. see illustration 7-2A
- p. 296, Table I (iii): Regular Polytopes, three regular polytopes in n dimensions (n ≥ 5)
- Weisstein, Eric W. "Simplex". MathWorld.
- Boyd, Stephen; Vandenberghe, Lieven (2004). Convex Optimization. Cambridge University Press. ISBN 978-1-107-39400-1. As PDF
External links
- Olshevsky, George. "Simplex". Glossary for Hyperspace. Archived from the original on 4 February 2007.