Tianwen-1
Tianwen-1 (TW-1) is an interplanetary mission to Mars by the China National Space Administration (CNSA) to send a robotic spacecraft, which consists of an orbiter, deployable camera, lander and a rover. The mission was successfully launched from the Wenchang Spacecraft Launch Site on 23 July 2020[10] with a Long March 5 heavy-lift rocket, and is currently en route to Mars, expected to reach planetary orbit on 10 February 2021.[11] Tianwen has so far completed two mid-course orbital corrections and performed self diagnostics on multiple payloads.[12] The spacecraft has begun to conduct scientific operations with the Mars Energetic Particle Analyzer, mounted on the orbiter, which has already transmitted data back to ground control. Its objectives are to search for evidence of both current and past life, and to assess the planet's environment. If the rover lands on Mars it will make China the third country to do so after Russia and USA.[4][13]
.png.webp) Tianwen-1 undergoing tests in 2019. The silver capsule on top houses the lander and rover, and the gold bottom half with the rocket engine is the orbiter. | |
| Names | Huoxing-1 (火星-1) (2018–2020)[1][2][3] |
|---|---|
| Mission type | Planetary science with an orbiter, lander and rover |
| Operator | CNSA |
| COSPAR ID | 2020-049A |
| SATCAT no. | 45935 |
| Mission duration | 200 days, 16 hours, 2 minutes (since launch) Orbiter: 2 Earth years (planned) Rover: 90 sols (planned)[4] |
| Spacecraft properties | |
| Spacecraft type | Orbiter, lander, rover, deployable camera |
| Manufacturer | China Aerospace Science and Technology Corporation (CASC) |
| Launch mass | Total: 5,000 kg (11,000 lb) Orbiter: 3,175 kg (7,000 lb) Rover:240 kg (530 lb) |
| Dimensions | Rover: 2.6 × 3 × 1.85 metres |
| Start of mission | |
| Launch date | 23 July 2020, 04:41:15 UTC [5] |
| Rocket | Long March 5 |
| Launch site | Wenchang, LC-101 |
| Contractor | China Aerospace Science and Technology Corporation |
| Mars orbiter | |
| Spacecraft component | Orbiter |
| Orbital insertion | 10 February 2021 (planned)[6] |
| Mars lander | |
| Spacecraft component | Lander |
| Landing date | May 2021 (planned)[7] |
| Landing site | Utopia Planitia[8] |
| Mars rover | |
| Spacecraft component | Rover |
| Landing date | May 2021 (planned)[9] |
| Landing site | Utopia Planitia[8] |
Chinese Planetary Exploration (Chinese: 中国行星探测) Mars logo | |
The name "Tianwen" (simplified Chinese: 天问; traditional Chinese: 天問; lit. 'heavenly questions') comes from the long poem of the same name written by Qu Yuan (about 340–278 BC), a poet of Ancient China.[14]
In September, Tianwen-1 deployed the TW-1 Deployable Camera (T.D.C.), a small satellite with two cameras that took photos of and tested a Wi-Fi connection with Tianwen-1.[15]
Overview
.jpg.webp)
China's Mars program started in partnership with Russia. In November 2011, the Russian spacecraft Fobos-Grunt, destined for Mars and Phobos, was launched from Baikonur Cosmodrome. The Russian spacecraft carried with it an attached secondary spacecraft, the Yinghuo-1, which was intended to become China's first Mars orbiter (Fobos-Grunt also carried experiments from The Planetary Society and Bulgaria). However, [1[Fobos-Grunt]]'s main propulsion unit failed to boost the Mars-bound stack from its initial Earth parking orbit and the combined multinational spacecraft and experiments eventually reentered Earth's atmosphere in January 2012.[16] China subsequently began an independent Mars project[17] and the current mission, which was formally approved by Chinese authorities in early 2016,[18] is the result.
The new Chinese Mars spacecraft, consisting of an orbiter and a lander with an attached rover, is developed by the China Aerospace Science and Technology Corporation (CASC) and managed by the National Space Science Centre (NSSC) in Beijing. If the landing is successful, the lander would then release a rover. This rover will be powered by solar panels and is expected to probe the Martian surface with radar and to perform chemical analyses on the soil; it would also look for biomolecules and biosignatures.[4]
The TW-1 Deployable Camera (T.D.C.) deployed from the orbiter in September while en route to Mars. Its mission was to photograph the Tianwen-1 orbiter and the lander's heat shield. Two wide-angle lenses on the deployable camera were programmed to one image a second. The images were transmitted back to Tianwen via a wireless radio link, then downlinked back to teams in China.[15]
Scientific objectives
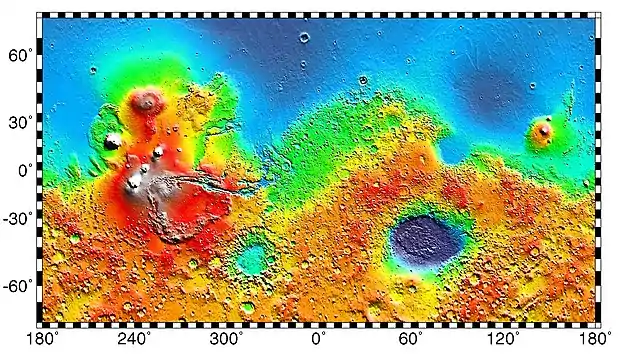
The aims of the mission may include the following: find evidence for current and past life, produce Martian surface maps, characterize Martian soil composition and water ice distribution, examine the Martian atmosphere, and in particular, its ionosphere, among others.[19] Simulated Martian landings have been performed as part of mission preparations by the Beijing Institute of Space Mechanics and Electricity.
The current Mars mission also would serve as a demonstration of technology that will be needed for an anticipated Chinese Mars sample-return mission proposed for the 2030s. There was also a plan that involved using the current mission to cache Martian rock and soil samples for retrieval by the later sample-return mission.[20]
Mission planning


In late 2019, the Xi'an Aerospace Propulsion Institute, a subsidiary of CASC, stated that the performance and control of the future spacecraft's propulsion system has been verified and had passed all requisite pre-flight tests, including tests for hovering, hazard avoidance, deceleration, and landing. The main component of the lander's propulsion system consists of a single engine that provides 7500 newtons of thrust. The spacecraft's supersonic parachute system had also been successfully tested previously.[18]
CNSA initially focused on the Chryse Planitia and on the Elysium Mons regions of Mars in its search for possible landing sites for the lander and its associated rover. However, in September 2019, during a joint meeting in Geneva of the European Planetary Science Congress-Division for Planetary Sciences, Chinese presenters announced that two preliminary sites in the Utopia Planitia region of Mars have instead been chosen for the anticipated landing attempt, with each site having a landing ellipse of approximately 100 by 40 kilometres.[18]
In July 2020, CNSA provided landing coordinates of 110.318 degrees east longitude and 24.748 degrees north latitude, within the southern portion of Utopia Planitia as the specific primary landing site. The area appears to provide a relatively safe place for a landing attempt but is also of great scientific interest, according to Alfred McEwen, director of the Planetary Image Research Laboratory at the University of Arizona.[8]
By 23 January 2020 the Long March 5 Y4 rocket's hydrogen-oxygen engine had completed a 100-seconds test, which was the last engine test prior to the final assembly of the carrier rocket. It successfully launched on 23 July 2020.[10]
The spacecraft is due to enter Mars orbit on 10 February 2021, according to China's CCTV news network.[21] The five-ton spacecraft will perform a burn of its engines to slow it down enough to be captured by Mars' gravitational pull.[22]
Scientific instruments

To achieve the scientific objectives of the mission, the Tianwen-1 orbiter and rover are equipped with 13 instruments:[23]
- Orbiter
- Medium Resolution Camera (MRC) with a resolution of 100 m from a 400 km orbit
- High Resolution Camera (HRC) with a resolution of 2 m from a 400 km orbit
- Mars Magnetometer (MM)
- Mars Mineralogy Spectrometer (MMS), to determine elementary composition
- Orbiter Subsurface Radar (OSR)
- Mars Ion and Neutral Particle Analyzer (MINPA)
- Mars Energetic Particle Analyzer[23]
- Rover
- Ground-Penetrating Radar (GPR), to image about 100 metres (330 ft) below the Martian surface[13]
- Mars Surface Magnetic Field Detector (MSMFD)
- Mars Meteorological Measurement Instrument (MMMI)
- Mars Surface Compound Detector (MSCD)
- Multi-Spectrum Camera (MSC)
- Navigation and Topography Camera (NTC)
International collaborations
Argentina's CONAE is collaborating on Tianwen-1 by way of a Chinese-run tracking station installed in Las Lajas, Neuquén. The facility played a previous role in China's landing of the Chang'e-4 spacecraft on the far side of the moon in January 2019.[24]
France's Institute for Research in Astrophysics and Planetology (IRAP) in Toulouse is collaborating on the Tianwen-1 rover. Sylvestre Maurice of IRAP said, "For their Laser Induced Breakdown Spectroscopy (LIBS) instrument, we have delivered a calibration target that is a French duplicate of a target which is on NASA's Curiosity Mars rover. The idea is to see how the two datasets compare."[24]
Austria's Austrian Research Promotion Agency (FFG) aided in the development of a magnetometer installed on the Chinese Mars orbiter. The Space Research Institute of the Austrian Academy of Sciences in Graz has confirmed the group's contribution to the Tianwen-1 magnetometer and helped with the calibration of the flight instrument.[24]
See also
| Wikimedia Commons has media related to Tianwen-1. |
- Astrobiology – Science concerned with life in the universe
- Climate of Mars – Climate patterns of the terrestrial planet
- Chinese Deep Space Network
- European Space Agency
- ESTRACK
- Mars Express orbiter
- ExoMars rover – An astrobiology program studying Mars
- Exploration of Mars
- Life on Mars – Scientific assessments on the microbial habitability of Mars
- List of missions to Mars – Wikipedia list article
- Emirates Mars Mission, 2020 Mars mission with its Hope orbiter
- Mars 2020, U.S. mission to Mars
- Perseverance rover (Mars 2020 rover component)
- Mars sample return mission
References
- "中国火星探测器露真容 明年发射". 12 October 2019.
- The Global Exploration Roadmap. NASA International Space Exploration Coordination Group. January 2018
 This article incorporates text from this source, which is in the public domain.
This article incorporates text from this source, which is in the public domain. - China's Deep Space Exploration Roadmap. 2018.
- "China Exclusive: China's aim to explore Mars". Xinhua News. 21 March 2016. Retrieved 24 March 2016.
- Wall, Mike. "China launches ambitious Tianwen-1 Mars rover mission". Space.com.
- "Tiān wèn yī hào tàncè qì fēixíng lǐchéng túpò 3 yì qiān mǐ" [Tianwen-1 Has Flown More Than 300 Million Kilometers] (in Chinese). 17 November 2020. Retrieved 12 January 2021.
- "Tiān wèn yī hào tàncè qì fēixíng lǐchéng túpò 3 yì qiān mǐ" [Tianwen-1 Has Flown More Than 300 Million Kilometers] (in Chinese). 17 November 2020. Retrieved 12 January 2021.
- Andrew Jones 28 October 2020. "China chooses landing site for its Tianwen-1 Mars rover". Space.com. Retrieved 16 November 2020.
- "Tiān wèn yī hào tàncè qì fēixíng lǐchéng túpò 3 yì qiān mǐ" [Tianwen-1 Has Flown More Than 300 Million Kilometers] (in Chinese). 17 November 2020. Retrieved 12 January 2021.
- Jones, Andrew (23 July 2020). "Tianwen-1 launches for Mars, marking dawn of Chinese interplanetary exploration". spacenews.com. Retrieved 23 July 2020.
- Roulette, Joey (5 February 2021). "Three countries are due to reach Mars in the next two weeks". The Verge. Retrieved 7 February 2021.
- "China's Mars probe completes deep-space maneuver - Xinhua | English.news.cn". www.xinhuanet.com. Retrieved 10 October 2020.
- The subsurface penetrating radar on the rover of China's Mars 2020 mission. B. Zhou, S. X. Shen, Y. C. Ji, etal. 2016 16th International Conference on Ground Penetrating Radar (GPR). 13–16 June 2016.
- "China's First Mars Exploration Mission Named Tianwen-1". XinhuaNet. 24 April 2020. Retrieved 24 April 2020.
- Clark, Stephen. "China's Mars-bound probe returns self-portrait from deep space – Spaceflight Now". Retrieved 14 December 2020.
- Zolotukhin, Alexei (15 January 2012). "Russian Phobos-Grunt Mars probe falls in Pacific Ocean". RIA Novosti. Retrieved 16 January 2012.
Phobos-Grunt fragments have crashed down in the Pacific Ocean
- Nan, Wu (24 June 2014). "Next stop – Mars: China aims to send rover to Red Planet within six years". South China Morning Post. Retrieved 23 February 2016.
- Jones, Andrew (8 November 2019). "China Says Its Mars Landing Technology Is Ready For 2020". IEEE Spectrum. Retrieved 30 December 2019.
- Zhou; et al. (13–16 June 2016). "The subsurface penetrating radar on the rover of China's Mars 2020 mission". 2016 16th International Conference on Ground Penetrating Radar (GPR). pp. 1–4. doi:10.1109/ICGPR.2016.7572700. ISBN 978-1-5090-5181-6. S2CID 306903.
- China Plans To Land A Rover On Mars In 2020. Alexandra Lozovschi, Inquisitr. January 17, 2019.
- http://www.cctvplus.com/news/20210103/8172029.shtml
- https://www.space.com/china-tianwen-1-mars-orbit-insertion-february-2021
- "China launches robotic mission to orbit, land, and drive on Mars". Spaceflight Now. 23 July 2020. Retrieved 24 July 2020.
- David, Leonard (22 July 2020). "China's Tianwen-1 Mars rover mission gets a boost from international partners". Space.com. Retrieved 10 September 2020.
| Active |
|  .jpg.webp) .jpg.webp) | ||||||||
|---|---|---|---|---|---|---|---|---|---|---|
| Past |
| |||||||||
| ||||||||||
| Future |
| |||||||||
| Exploration |
| |||||||||
Missions are ordered by launch date. Sign † indicates failure en route or before intended mission data returned. | ||||||||||
2020 in space | ||
|---|---|---|
| ||
| Space probe launches |
|   _on_Jul_14_2020_aligned_to_stars.jpg.webp) |
| Impact events |
| |
| Selected NEOs | ||
| Exoplanets |
| |
| Discoveries |
| |
| Comets | ||
| Space exploration |
| |
| ||
2021 in space | |
|---|---|
| |
| Space probe launches | |
| Impact events |
|
| Selected NEOs | |
| Exoplanets | |
| Discoveries |
|
| Comets | |
| Space exploration |
|
| |
